I'm quite happy with how the 1-servo drive train turned out on the LB-201 prototype. I think it has potential and is the right way to go, even if it needs some more work. Then the main design issue remaining is deciding on what method should be used for steering.
I've previously tried out articulated steering with the LB-101 prototype. As expected, that prototype barely worked at all. As I see it, effective articulated steering using only 3D printed parts will be difficult to achieve even with a more carefully worked out design.
In this log I'll present an idea for a different steering method. I'm calling it "scissor steering" for lack of a better term.
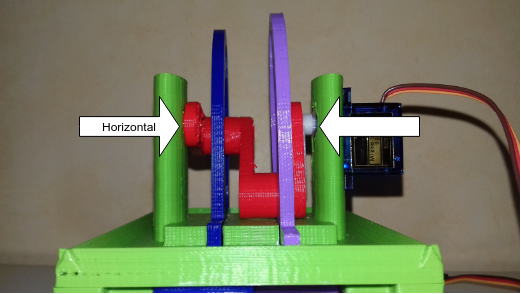
On the LB-201 prototype the cam axle is mounted horizontally between two pillars.
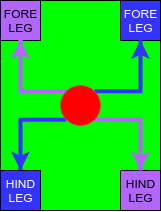
But when using this steering method, the cam axle needs to be mounted vertically instead. In the image below the vertical cam axle is represented by the red circle. The bottom end of the cam axle is mounted through a hole in the chassis, and its top end is connected to a 360° servo. It drives two yokes, represented by purple and blue arrows, each of which moves a diagonal pair of legs. Of course the yokes must now be horizontally oriented, not vertical like on LB-201.
Now let's forget about the cam and yokes for a second.
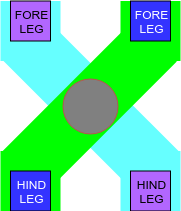
In the next image I've divided the chassis into two parts: green and cyan. They are connected by a pivot (the gray circle) which allows them to move like scissors. Let's also imagine that there are some gears around the pivot on the green part of the chassis, which is turned by a geared servo mounted to the cyan part.
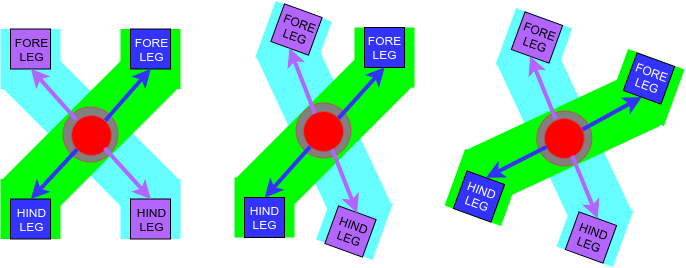
Now let's put the cam axle and yokes back into the picture.
In the figure series below the bottom end of the cam axle is mounted through a hole in the center of the pivot. Each yoke drives the two diagonal legs of its respective chassis part.
A right turn is executed through repetition of the following two steps:
- In the center figure, only the blue legs are touching ground. The cyan chassis part pivots clockwise.
- In the right figure, only the purple legs are touching ground. Now the green chassis part pivots clockwise by the same degree.
![]()
I believe this method should work both for rotating Landbeest while at a standstill, as well as for making a turn while walking.
The purple and blue yokes are basically only connected to their respective two legs. Consequently, as the cyan chassis part pivots clockwise (center figure) the purple yoke will pivot with it. This is allowed, since the cam axle rotates on a vertical axis. However the synchronization between the yokes will get somewhat messed up until the green part has executed its pivot (right figure). But I don't think that will be a big deal as long as the pivot angle doesn't get too large.
It will probably be a while until I can fully put this idea to practice. The last prototypes I've made has incrementally improved on previous stuff, but this one will be more of a reboot. I'll probably make at least one intermediary prototype before I attempt a fully realized one.
I think this is a pretty neat idea, but implementing it is a whole other story. There will be bunch of practical issues cropping up once I start dealing with the reality of this thing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.