I've now built the LB-302 prototype, which implements the scissor steering method I described in my last log. It was actually only supposed to be a throw-away draft—I basically had no expectation for it to work on first try. But it turned out to work great. Go figure!
This won't be a long post. Mainly I want to show this video of LB-302 in action:
This shade of blue looks pretty awful on camera. I had planned to print the actual demo version parts with contrasting colors in order to showcase the mechanism better. Here's an image of the main components for some more clarity:
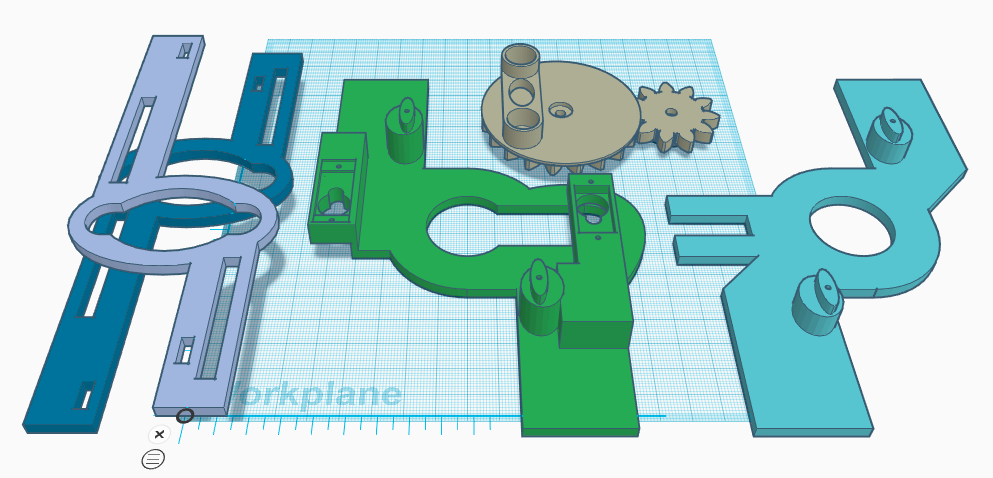
The reduction gear is based on these parameterized gears made by Leemon Baird.
I was happy to discover that LB-302 can achieve a tight turning radius with no problem. And it also has the ability to pivot 360° on the spot.
LB-302 only uses two servos. But I did have to cheat and add a cherry switch to the component list. It's necessary in order to monitor the legs position, since they're driven by a continuous 360° servo which lacks position control. The requirement to keep track of feedback from the switch also makes the Arduino code a bit more complex than I'd like it to be.
Overall though I'm quite pleased with how this prototype turned out. Obviously it's not polished and not very practically useful. For one thing there's not much room for fitting a pcb and batteries onto the chassis. But I finally have a practical solution for steering, so I still feel I've made some real progress with this one.
I'll probably do a more elaborate writeup on this later, along with a better looking prototype.
On a final note I'd just like to mention that my project placed as one of seven "runners-up" in the Hackaday 3D printed gears challenge. Sweet! Thank you judges! Now I'll head over to Tindie and try to decide what to spend my $100 voucher on.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Very nice! Though I tend to watch your videos muted as the sound of those servos is a pain to my ears haha :)
Are you sure? yes | no
:-D Well at least you can mute the sound. You still have to endure the shaky cam and bad focus.
Seriously though, thanks for the encouragement and for following my progress.
Are you sure? yes | no