I find it facinating how a couple little robots can cause fully grown men to grind their teeth and express their dismay with unmentionable (albeit colorful) high volume outbursts. However, as the saying goes, "If it were easy everyone would do it." We're trying to keep this in mind, chanting it like a mantra while trying to talk ourselves out of booting the disobedient little suckers across the workshop...
First, we got some good news: the new edge sensors arrived. They seem like they'll work quite well for our application. They're small, light, and we can't see them drawing a whole lot of current. As an added surprise, after reading the data sheet, we discovered that they output either in 'low' or 'high' states just like the old sensors. We didn't have to change the code at all! Whoopee!!!
As for the rest of the evening however...
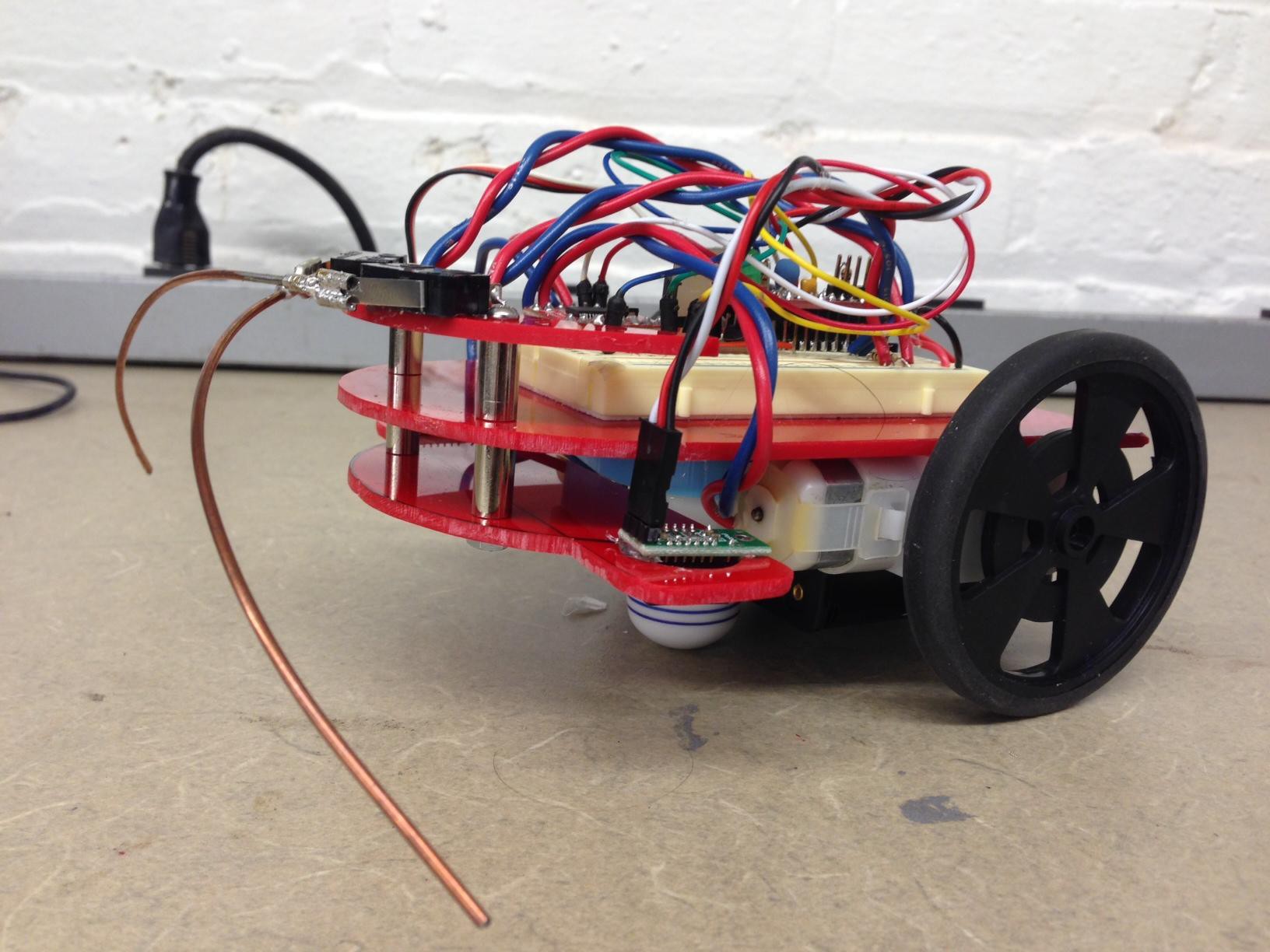
We decided that between the soon to be installed optical elements and the edge and obstacle sensors, there wasn't enough room to fit everything in up front. So, we went with a multitiered front, with each element getting it's own section. The obstacle sensors were moved to the top. By putting them on the highest spot of the 'bot, it should take care of their tendency to wedge themselves under things. We had already tried to mount the edge sensors under the main deck like we did with the previous edge sensors, but it might have been at the outside of their range. We had a little trouble getting a solid lock with them up high, so we decided to put them down on a lower tier. Unfortunately, the added weight of the extra acrylic, screws, standoffs and sensors made Frankie extremely nose-heavy. It wasn't falling over by any means, but it was leaning enough forward that it was taking weight off the back, and the wheels were having problems getting traction. The new sensors were also slower to respond than the old ones, for a couple of reasons. The old sensors had feelers that extended a good distance in front of the 'bot, and it didn't take any processing time or power to go 'click'. The new ones only measure straight down from where they are, with a split second of lag. We discovered this when we mounted them in the old spot, and tried to compensate for it by moving them forward, but it wasn't enough. All this contributes to the 'bot being just a split second too slow, and throwing itself into reverse just as it goes over the edge.
We might be a little melodramatic when it comes to our frustration. After mulling it over for a day, we'll agree that all these problems have solutions, even if they entail ripping the 'bots apart and moving things around. It's not the end of the world. But man, how annoying...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.