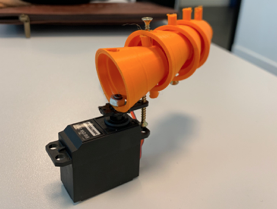
Once the 4 tail cones are connected together they can be connected to the servo. You can use any servo but I would advise using a high torque servo with base dimensions 2.5cmx4.5cm. The servo will contain a thread at the centre of the rotating part. using a nut and bolt the bolt can be passed through the hole in the cone and the nut used to secure the tail in place. Another screw can be used to stop the servo from over rotating. this is done by using a long screw into the first downward facing pin on the bottom cone. I used a 6cm long screw.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.