 Dan Royer
Dan RoyerBad software is monolithic. good software is made of smaller, unit tested pieces.
Bad robots are monolithic. good robots are made of smaller, unit tested pieces.
I’ve been working on a single actuator that can be repeated six times to make an arm.
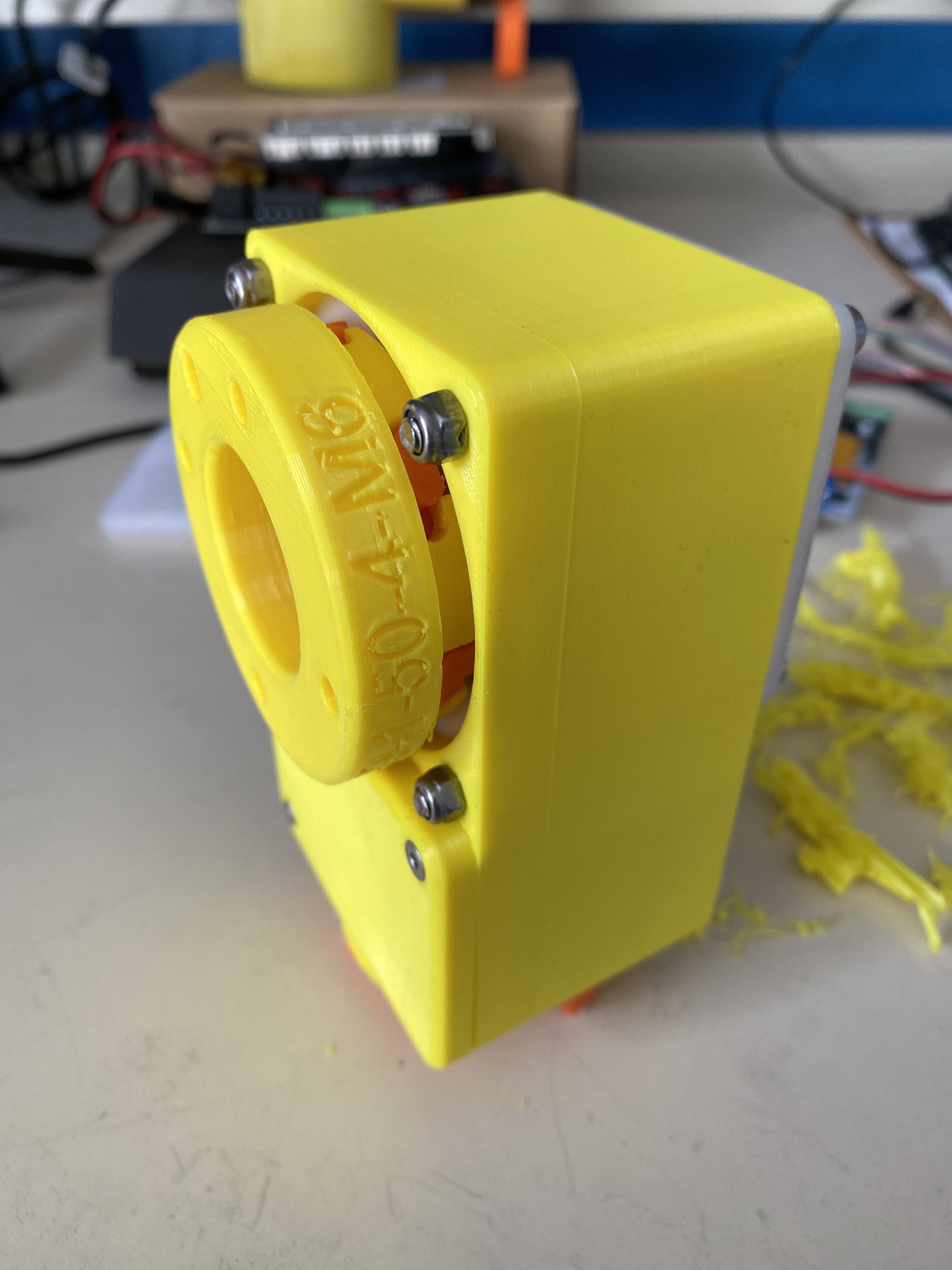

It has a harmonic drive and is daisy chain able. That means low part count, low part TYPE count, easy manufacture, easy maintenance, easy testing, easy reuse, and more.
Ive also been working on a pcb to run each unit. Canbus, 72mhz, 16bit absolute rotation resolver, it’s gonna be sweet. Already being populated, 25 days until it arrives.
I have fancier harmonic drives made of metal so I miiiight make a bigger unit just at the shoulder. We’ll see. The six-identical model should carry 2kg at 35cm with high repeatable accuracy. A bigger shoulder is just for those players that can afford to go further.
Right. I hate this layout and this crummy editor so I’m out. Come to my discord if you want to discuss further.
Ps: stop liking my old dead projects. Sixi 1 is old news.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.