The Thor motors are in.
Thor needs 7 of them. (One is missing on the family photo)
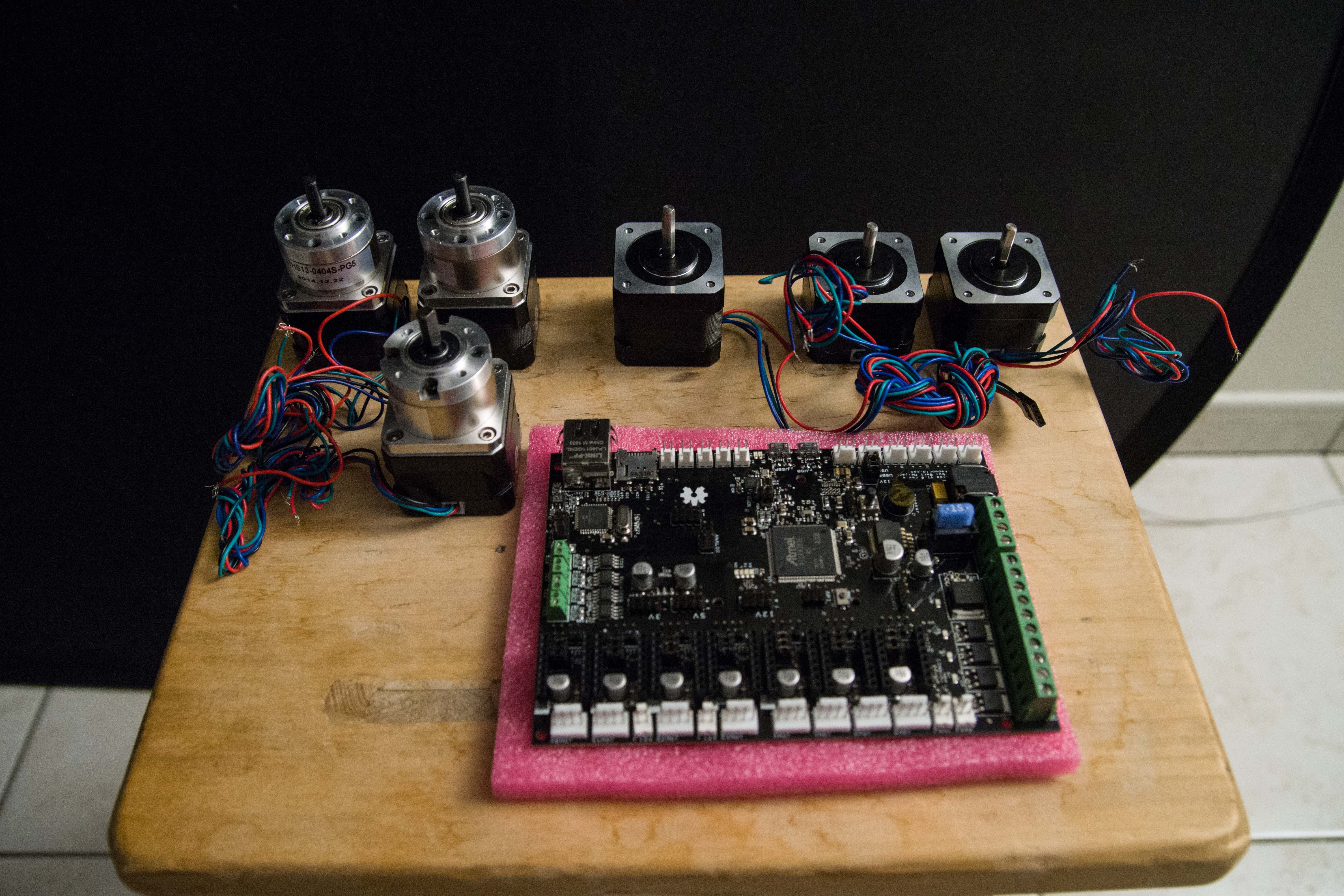
- Top left are 3 planetary gear motors to control the up and down arm movement.
- Middle top is the motor that will control the base.
- Right top are 2 motors to control the hand.
- One motor to rotate the upper arm(missing on the photo)
Also the main board to be used.
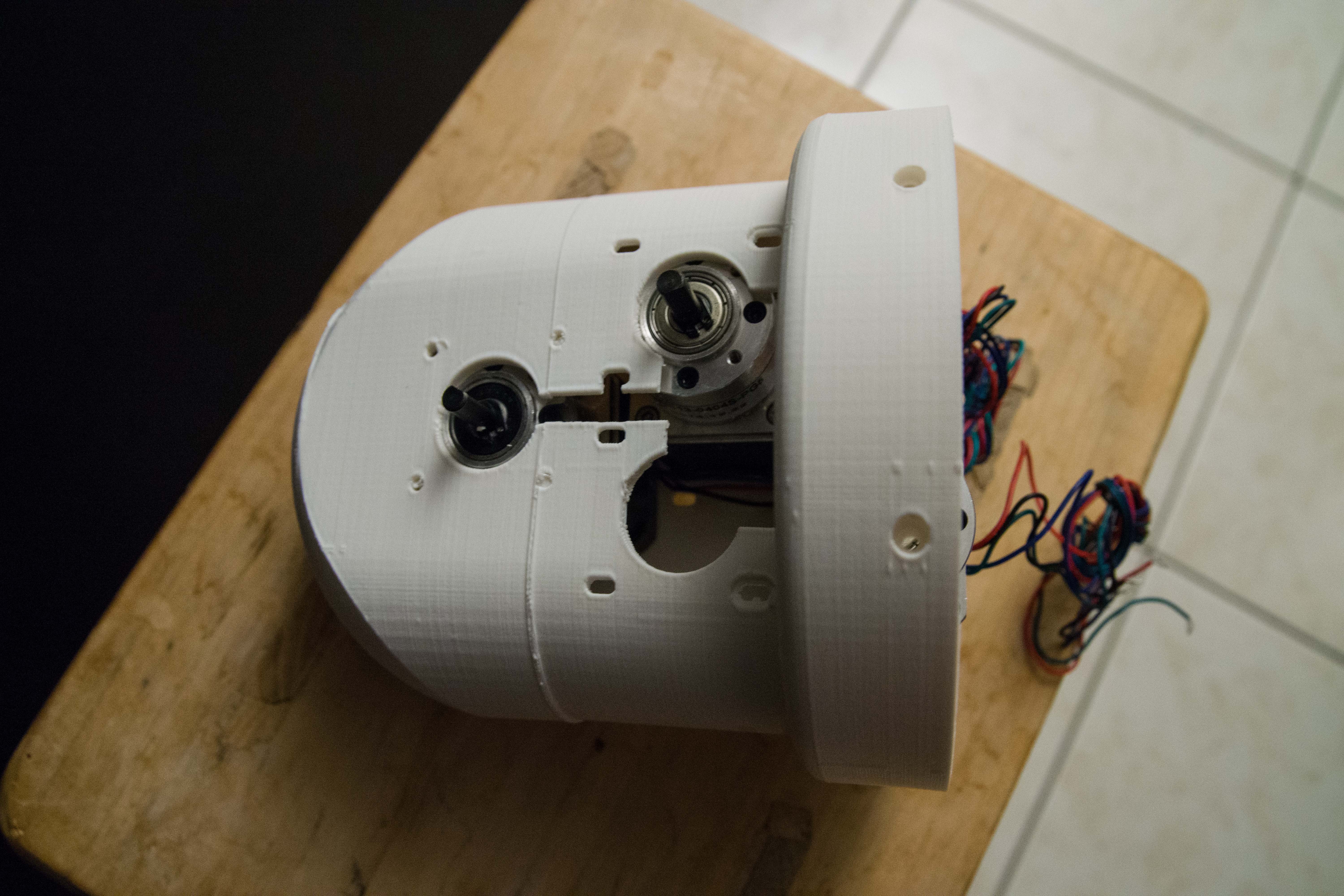
Trial assembly turns out to have an issue in getting the motors inside the housing. It is too tight.
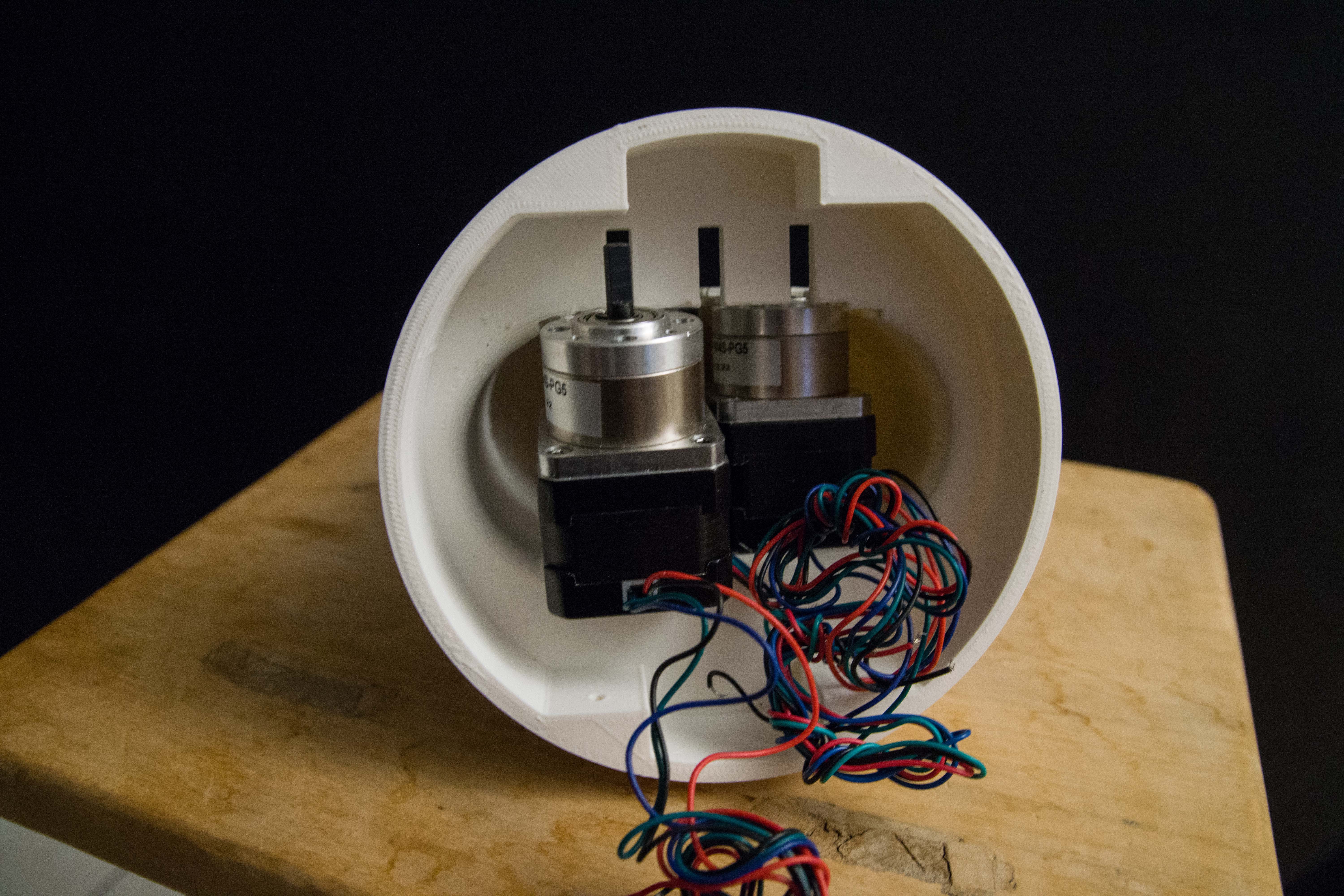
The bottom 2 geared motors (on the right in this view) are going to work together as one pair because it has to support the complete arm.
This model was printed in multiple times and then glued together because the 3D printer had the Thermal Runaway issue and aborted the printing. I broke away some front parts to get the motors inside as a test. This part needs to be reprinted anyway.
The idea is to slit the motor down the opening.
Now that these 3 motors are inside the housing, I am wondering if we don't have a cooling problem now.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.