When data is transmitted along a bus, serial interface, RF link, etc. it is common practice to do some form of error checking and correcting. This is also true of data being stored such as in RAM or in non-volatile storage. The simplest of these techniques is called parity checking and it simply detects if a transmission error has occurred, but cannot correct a detected error. Further, the commonplace implementation can only detect one incorrect bit for a given set of bits transmitted. If there is more than one error in a given set of bits, it may or may not detect the errors.
In binary systems this is normally done by XOR’ing each pair of bits and then XOR’ing those bits, and so on until you have one bit at the end. This results in a bit that is a 1 if there is an odd number of 1’s in the group and 0 if there is an even number of 1’s. This is called odd parity. If you want an even parity bit, just change the last XOR into an XNOR.
In balanced ternary,
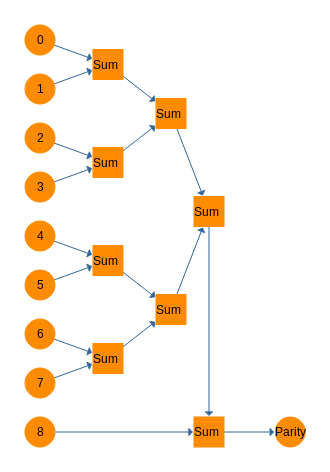
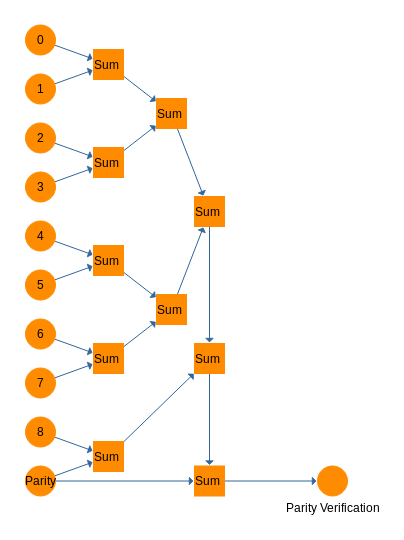
the Sum gate performs this function admirably, though the behavior of the parity trit is different. Simply cascade all of the input bits through a series of Sum gates and you end up with a parity trit. On the receiving side, do the exact same thing with all of the trits including the parity trit. Use the output of the Sum cascades and sum that with the incoming parity trit again. If this circuit outputs a 0, no errors were detected. If it outputs a - or a +, an error has been detected. Below is a diagram for a parity calculator and then a parity checker.
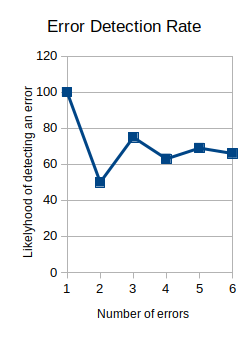
This subject brings up some interesting ideas regarding ternary errors and error correction. Consider that each trit can be wrong in two different ways instead of just one as in a binary system. Also, the parity trit can transmit data about the nature of the error by being either - or +. I haven't explored that yet, but it looks like it would be a valuable thing to know. Finally, a very interesting phenomena related to multi-trit errors. In the above ternary system, the ternary parity trit has a variable likelihood of detecting a multi-trit error. As the number of errors increases, the likelihood of detecting them oscillates up and down, narrowing each time until it finally converges on 66% or 2/3rds. I'm not sure it's useful, but it's interesting.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.