 Zander Mao
Zander MaoIntroduction:
We think it would be great if our robot can tell us when we need to recharge it. To do that we used one of the ADC pins for testing. The result is pretty good.
Design:

We are using a 7.4V Li-Po battery for the robot. ESP32's ADC pins have several modes, which have different voltage input ranges. We are expecting a 12V peak when charging the robot, so the circuit is designed to be able to handle 12V input and the maximum voltage for the ADC pin will be 2.4V. The 0.1uF capacitor is for wave filtering.
Experiment& Result
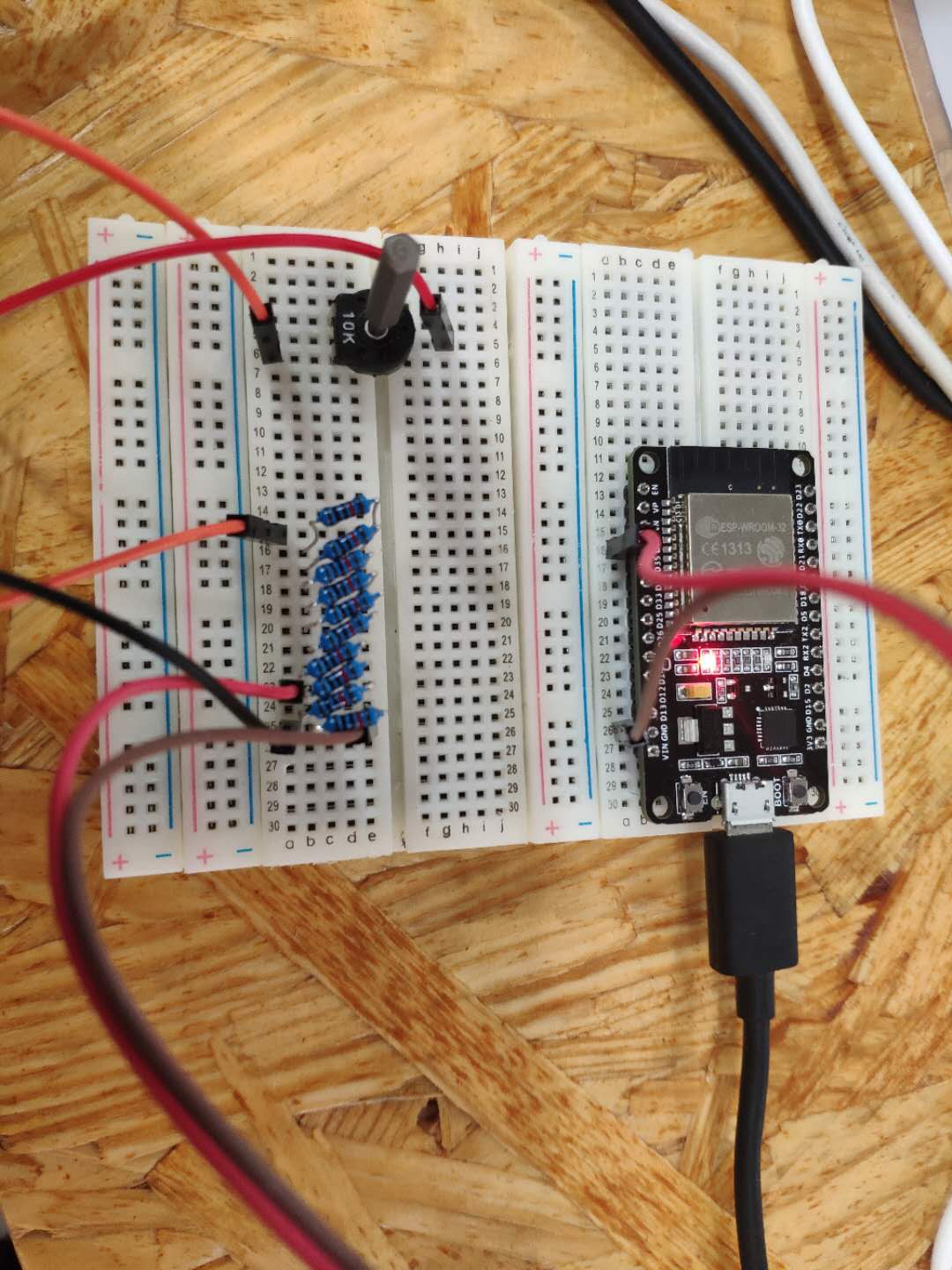
We are using a 10k potentialmeter to simulate the case where the voltage of the battery drops. We don't have 80k/20k resistors for the moment, so we used 10*10k resistors for the test. The result was pretty good. Also, since the voltage drop is not entirely proportional to the battery level, we would just set a threshold value for low battery, and some signal to indicate that it's power is low. Result is shown in the video below.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.