 Emil Novak
Emil NovakSo I was experimenting with the FilaMecanum's design in the past few days. I’m Emil by the way. Let me show you my journey so far.
To give some context my goal is to build a small scale rover. (max. 30x30x30 cm) I have some specific constraints and objectives in mind which I won't bore you with for now.
I started with Daren’s design, printed it and had some pla filament as tire. It was stiff, way too stiff so there was two ways to go forward. Either find (potentially buy) some flexible filament or use a different source, like zip ties. I have a 3D printer with a bowden extruder so wouldn’t have much use for flexible filament and as the pictures show, I went with the second option.
Quickly realizing my inabilities with openscad I started operations with fusion.

(Excuse the filth on my old caliper.)
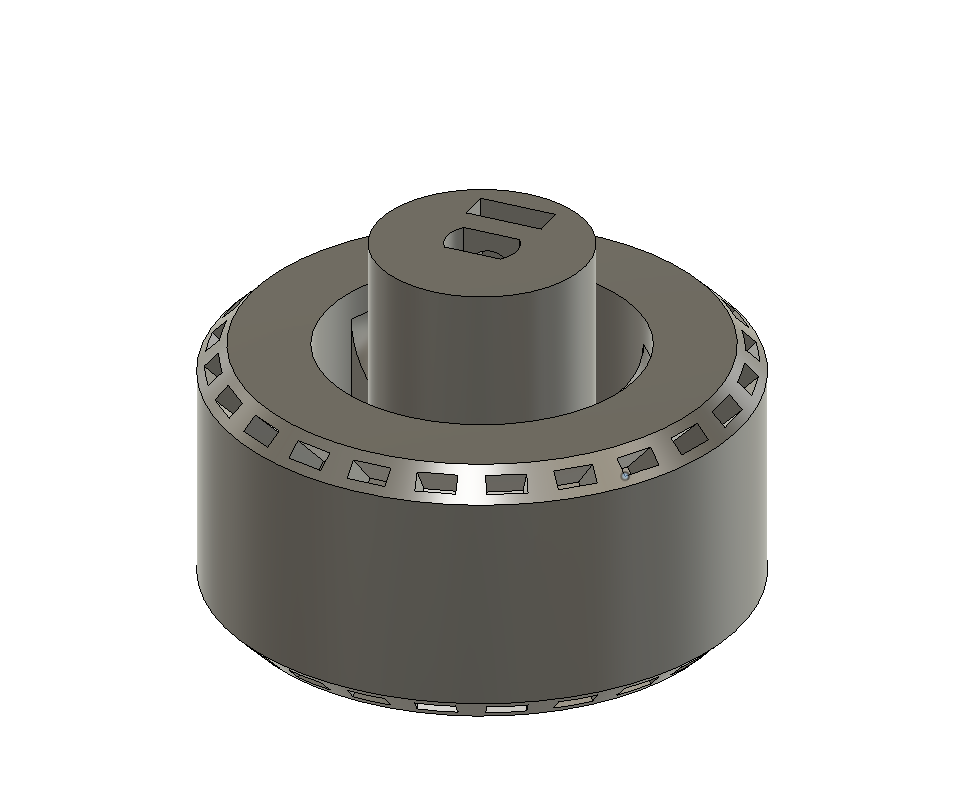
The first version was press fit to the shaft and had some printing issues. After this I reconsidered the shaft locking mechanism and moved the aforementioned part to the other side.
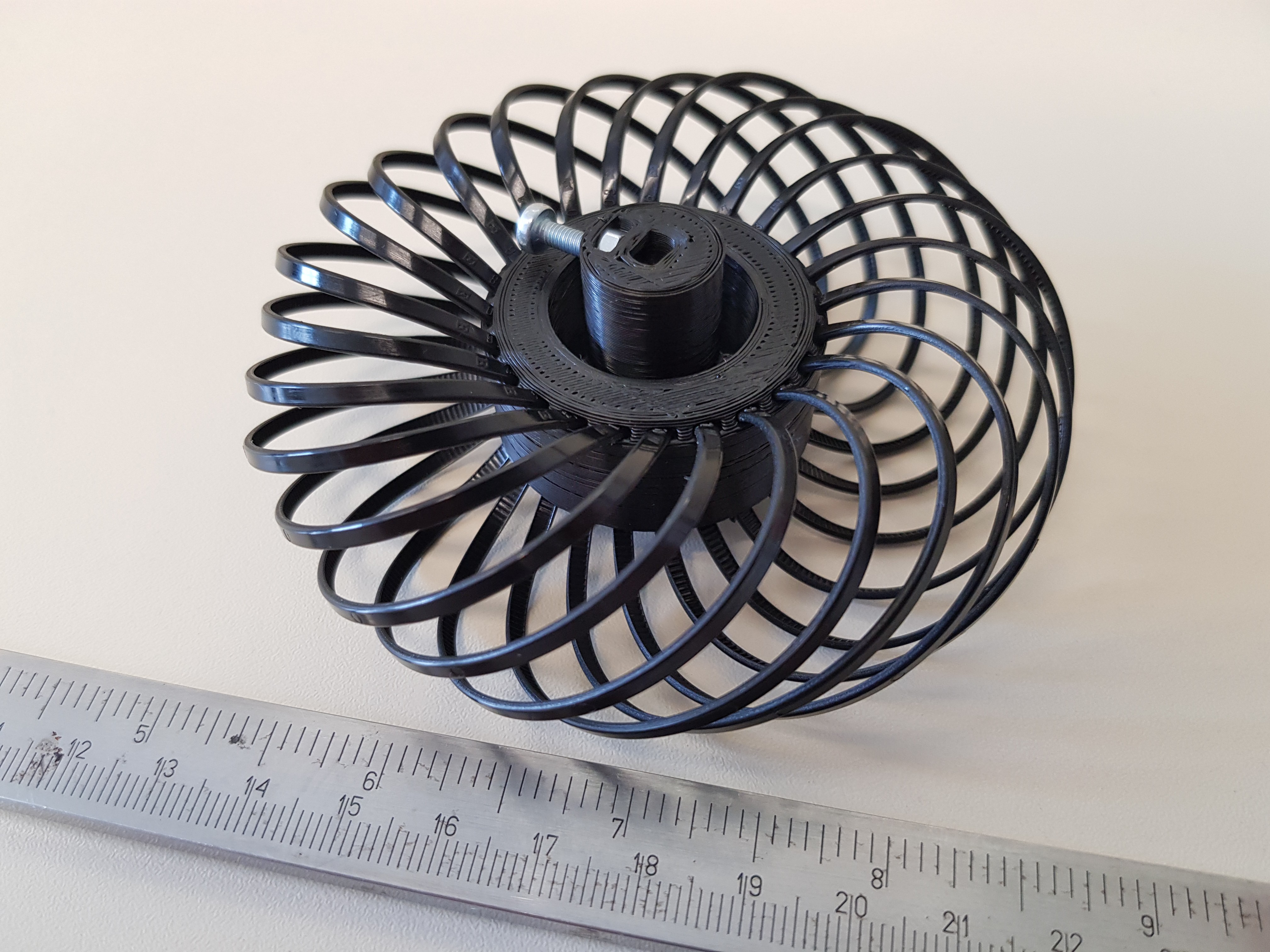
Here I present to you the moving construction.
No fancy inner transmission (yet) only a 5V 28BYJ stepper with bipolar mod driven by an A4988 driver module. The datasheet says the driver is operational from 8V, but seemingly 6.5V works fine too.
I would like to see the mecanum effect working soon so the next step is to order some more steppers and make a skeletal version of a test rover.
P.S.
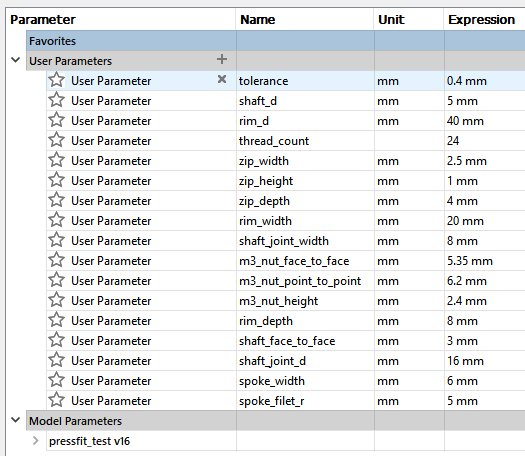
You can find the f3d cad on github; and these are my parameters:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
The zip-tie version looks fantastic. Can't wait to see how it works. It sucks that you basically have to build a completed rover drivetrain, just to see if this works.. I'm right there with you. The good news here is the one I'm building is going to weigh a ton, and your's will probably be much liter. Another data point...
I found out you need a little more space between the filaments to keep the layers from splitting at the edge, but your hub thickness may end up serving the same purpose. I also ended up making the loops shorter, with a larger rim, to mitigate some of the off-axis flexing of the filaments (or zip-ties in this case).
Are you sure? yes | no