 Michael G
Michael GConcept:
In order to build a robotics platform, I first considered the type and breadth of applications that I wished to address. As aerial vehicles are already inexpensive and available, I decided to focus on an on-land robotics platform capable of traversing terrain. Intended application areas include:
- Search and rescue
- Forestry and preservation surveying & data-logging
- Bomb-defusing
- Site inspection
- Package delivery
The robotic platform – called Spike [Buffy anyone?] – is designed as an open alternative to robots like Spot and Laikago the robot dogs. Critically, Spike is designed to cost less than $5,000 – rather than tens or hundreds of thousands of dollars – while also providing developers an open platform complete with source code to ensure that Spike sees the fullest possible utilization and range of possible applications.
Spike will also be designed to accept a range of modular components, including modular robotic arms and robotic end-effectors, such that the bot can be configured to achieve a variety of tasks. Similar to the approaches of Universal Robotics has taken with end-effectors for their robot arms, Spike will be capable of accepting a variety of robotics and end-effectors devices to achieve a wide range of tasks in real-world applications.
Bio-Inspiration:
The design phase started by deciding the shape and type of legs to use on the robot. As the goal is to produce a robotics platform capable of effectively maneuvering obstacles at reasonable speed, inspiration was taken from big cats.
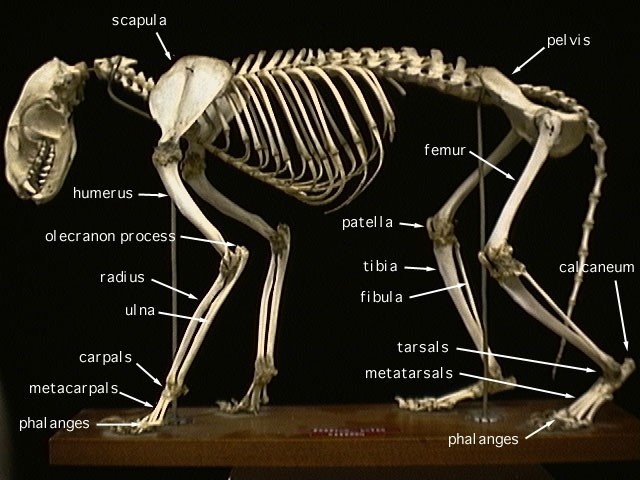
Notably, in big cat anatomy, the olecranon rotates anti-directionally relative to the patella. Further the legs are all capable of rotation thanks to the lower legs’ capacity for the two bones to twist past one another. As the goal is to build a robotics platform that is low-cost and fully-reproducible, it will be necessary to limit the degrees-of-freedom present in the robot. Thus, the six degrees of freedom present in the legs of most mammals will be sacrificed for only three, which has been long-demonstrated as effective in robots from hexapods to existing closed-source robot dogs.
Spike is centered around four modular, nearly identical (some mirroring) leg-assemblies. Accordingly, the design phase started by designing one of these leg assemblies
As I have access to a variety of tools (including a friend with an industrial waterjet), these tools were utilized to speed up the pace of design iterations, and parts were designed for manufacture for these tools. Notably, while most parts were designed to be made on a waterjet, all of them are designed such that they could also be made on only a hobby CNC-mill, or ideally a CNC-router. Spike will use a variety of materials, though almost all critical parts will be made from widely-available, easy-to-machine, and inexpensive ATP-5 aluminum (7000 series). Solidworks was used for the design, but both Fusion360 exported and .STEP files are also provided to ensure that anyone with any budget and ability can contribute to Spike.
For the sake of simplicity, some further deviation from bio-inspiration was taken for the sake of simplify – making the distance between centers of the upper leg and the distance from the center of the lower leg to the ball of the foot identical to simplify our walking model down the road.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.