 Frank
FrankWith the revision 3 device up and running, planning continues for the next revisions. While revision 3 achieved single axis solar tracking, the goal for revision 4 has been set to achieve dual axis tracking and dual motor control. Revision 4 will be the last with the two-color LCD ring. Here, the ring will grow to 48 LED's, plus there are another 16 LED's for the newly added elevation tracking display line. With this setup, I reached the maximum of eight IO expanders on a single I2C bus. In fact, I am going to max out the Arduino MKR Zero down to the last of its IO pins. For revision 5, I plan to split the functions into a solar tracking master controller, and individual panel motor control boards. A bigger MCU in the master controller needs to be decided, wireless data transmission considered, etc.
Below is the design draft for the revision 4 controller board:
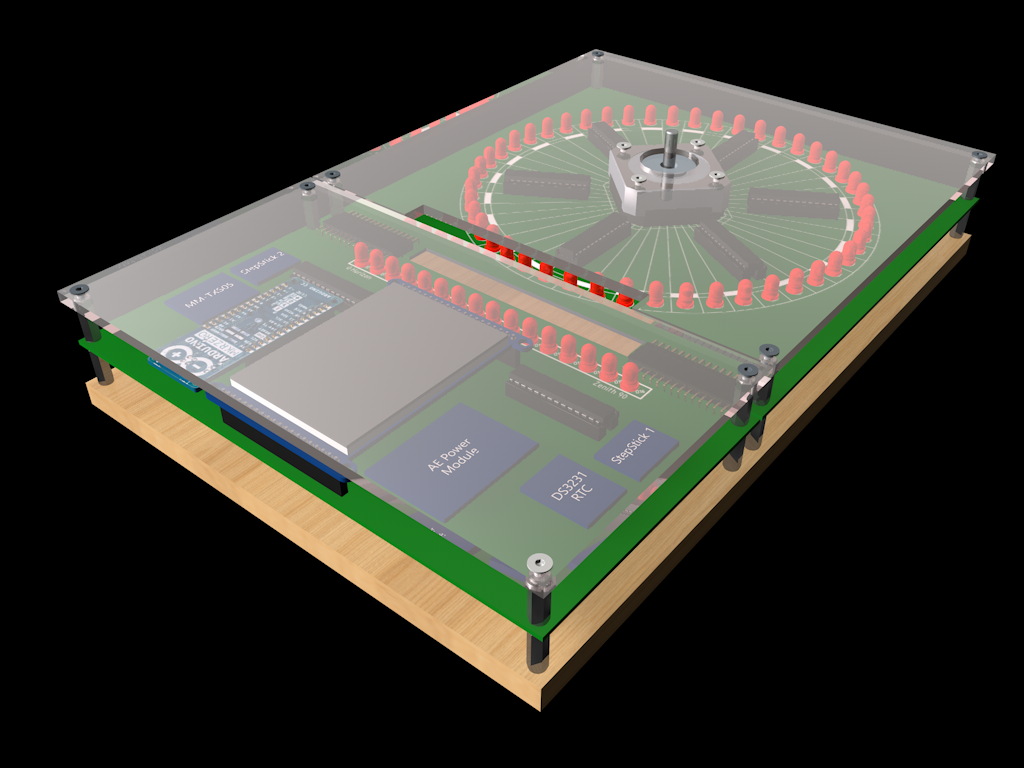
The controller will grow in size to approx. A4 (200x300mm), in order to host a small-scale 2x2W solar panel model on top of it. This model is to learn and become familiar with dual axis motor control. While it certainly won't achieve any real power generation, to practice small before scaling up is always a good idea. Also, in preparation of revision 5, I am implementing a TFT display for learning how to show the growing number of real-time parameters.
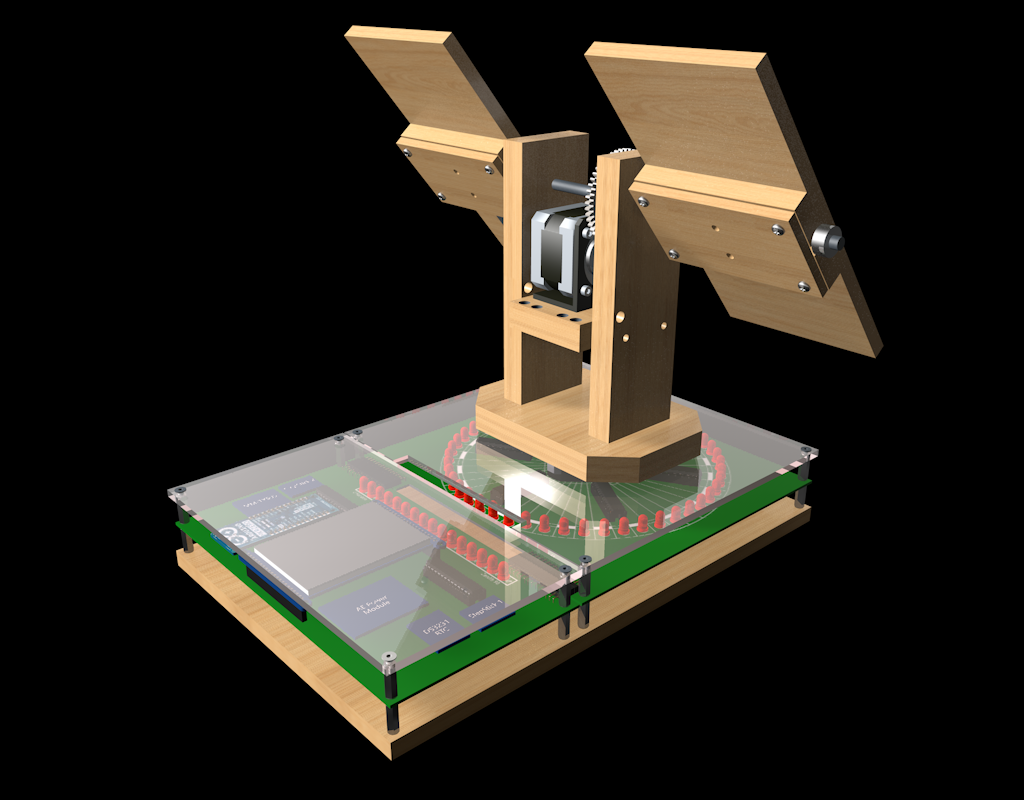
Below is a picture of the tiny 2x2W solar panel model, just imagine it to be 200W-class panels instead:

Now its back to KiCad, and the magic to turn a design into a real-world working device again. The schematic is almost complete, but routing and parts placement takes a lot of time.
P.S. I wonder if the small Arduino can manage this setup, only one way to find out...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.