 Mihai Oltean
Mihai OlteanThe current arm electronics is based on Pololu A-Star 32U4 mini board. My initial plan was to use Arduino Nano, but it did not have enough pins. Also, Nano, did have very small amount of RAM (2KB). Because of that I have decided to use A-Star 32U4 mini board.
However, as the project advances, it has become clear that A-Star Mini is not enough. My next plan was to use Arduino Mega for this purpose, but I did not like the Mega pins layout (they are placed around the board and the space inside them is too small to place all 6 stepper driver inside). So, for now, I have dropped the plans with Arduino Mega.
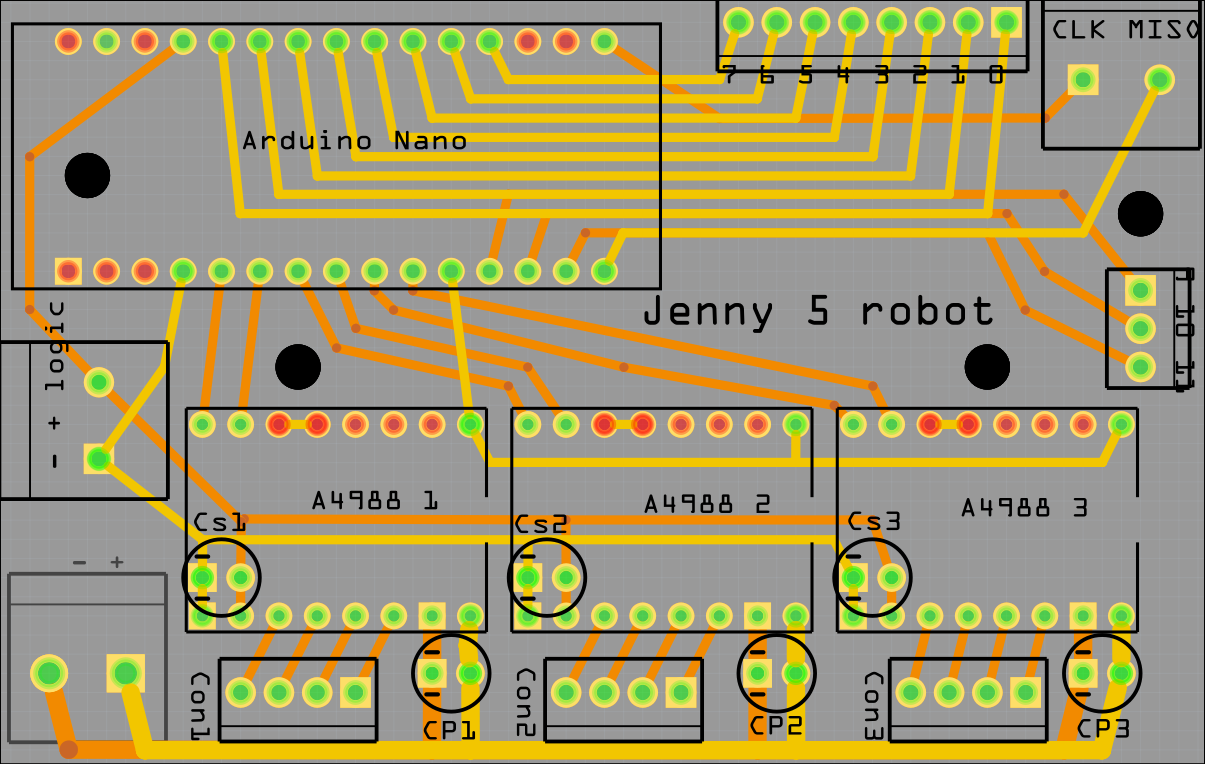
The latest idea is to split the arm electronics into 2 separate electronics, each controlling 3 stepper motors. Each electronics will be powered by Arduino Nano. In this way I would have available much more pins for sensors. Also, with the new Arduino Nano Every, the RAM is increased significantly to 6 KB which would be more than enough for the current version of Scufy firmware. The only drawback is that if the boards have to communicate, they have to do that through the serial board-pc-board path.
Yesterday I have designed the new board based on Arduino Nano and I sent it for fabrication. Below is picture of the PCB. The size of the new board is about half of the original one (the one based on the A-Star Mini). I hope to have it by the next week. After testing I will post the design to GitHub.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.