 Timo Birnschein
Timo BirnscheinTwo of these receivers are pretty bloody cool: They can run at 10hz which makes drones a lot more stable and specifically in GPS mode a lot more accurate to control.
I used a couple of different softwares to monitor and configure them.
The goal is to run them at 115200 baud and at 10hz update rate.
- Ublox Center
- Mini GPS Tool 1.7.1 (pretty much useless)
- Mini GPS Tool 1.4 (can configure the chipset baud rate - in order to do this manually one would need the checksum which is not mentioned in the configuration command manual)
- hterm (I use this to confirm I have the correct baud rate and also to manually send config commands to GPS receivers)
- Visual GPS View (It has great visualization capabilities to show how good the localization really is)
- PMTK Command Packet Manual (Holds all commands the GTPA modules understand. Unfortunately, not all commands have all examples spelled out such that the checksum is clear. I didn't have a checksum calculator handy so I used Mini GPS Tool 1.4 to change the baud rate, for instance)
In order to configure PMTK receivers, I ran Mini GPS Tool 1.4,
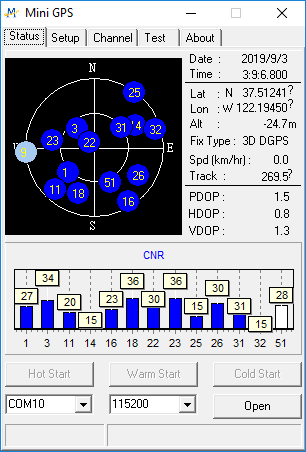
Went to the Setup tab and selected the baud rate:
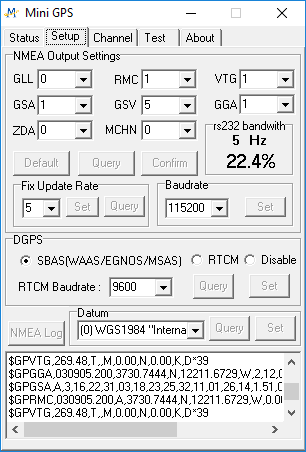
Please note, the Fix Update Rate can only be set up to 5 hz using this software. Not sure why, it makes no sense. However, using hterm, the command for 10 hz can be sent manually:
$PMTK220,100*2F<CR><LF>
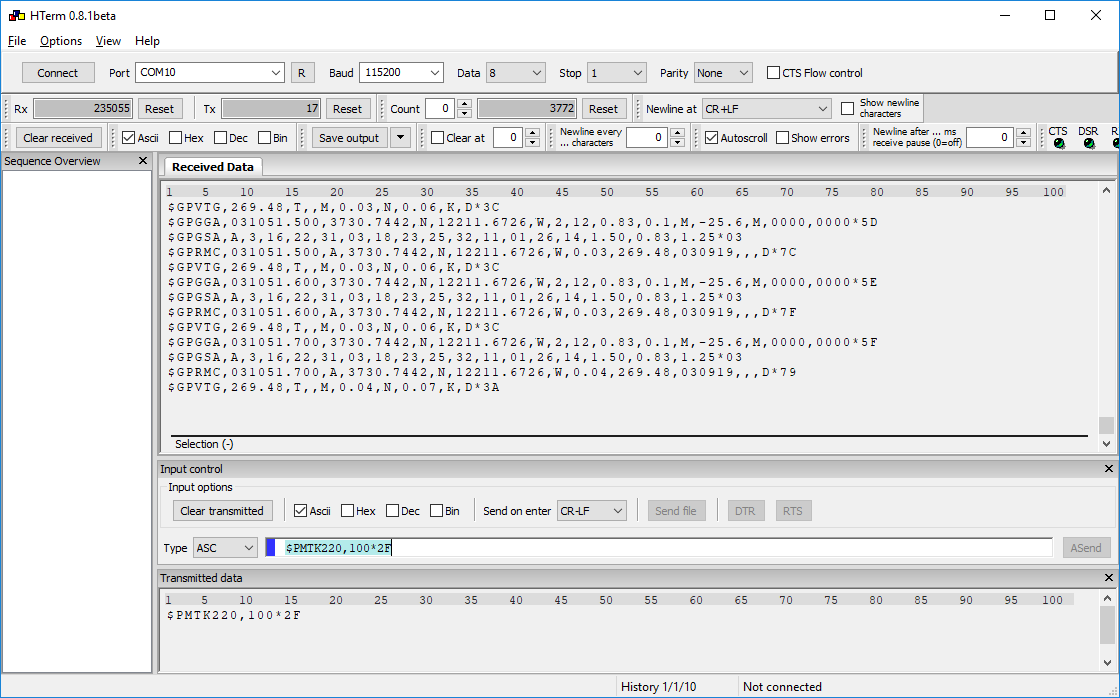
Please note also, I added CR+LF under "Send on enter". That will fire the command and the receiver starts sending with 10 hz update rate!
Power cycle brings it back to its standard settings: 9600 baud at 1hz.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.