 Steve
SteveI'm posting this actually quite a ways into the project. I started working on it around March-ish 2019, about the time that the final collapse of TheShop.build(nee' TechShop) happened and I lost access to a metal shop within a reasonable drive of SF.
So, here we are. My as-yet-unnamed SAWPPY-alike has now been moved to Circuit Launch in Oakland, CA. where I am one of their Roboticists in Residence, focusing on rovers and off-road, ruggedized robots.
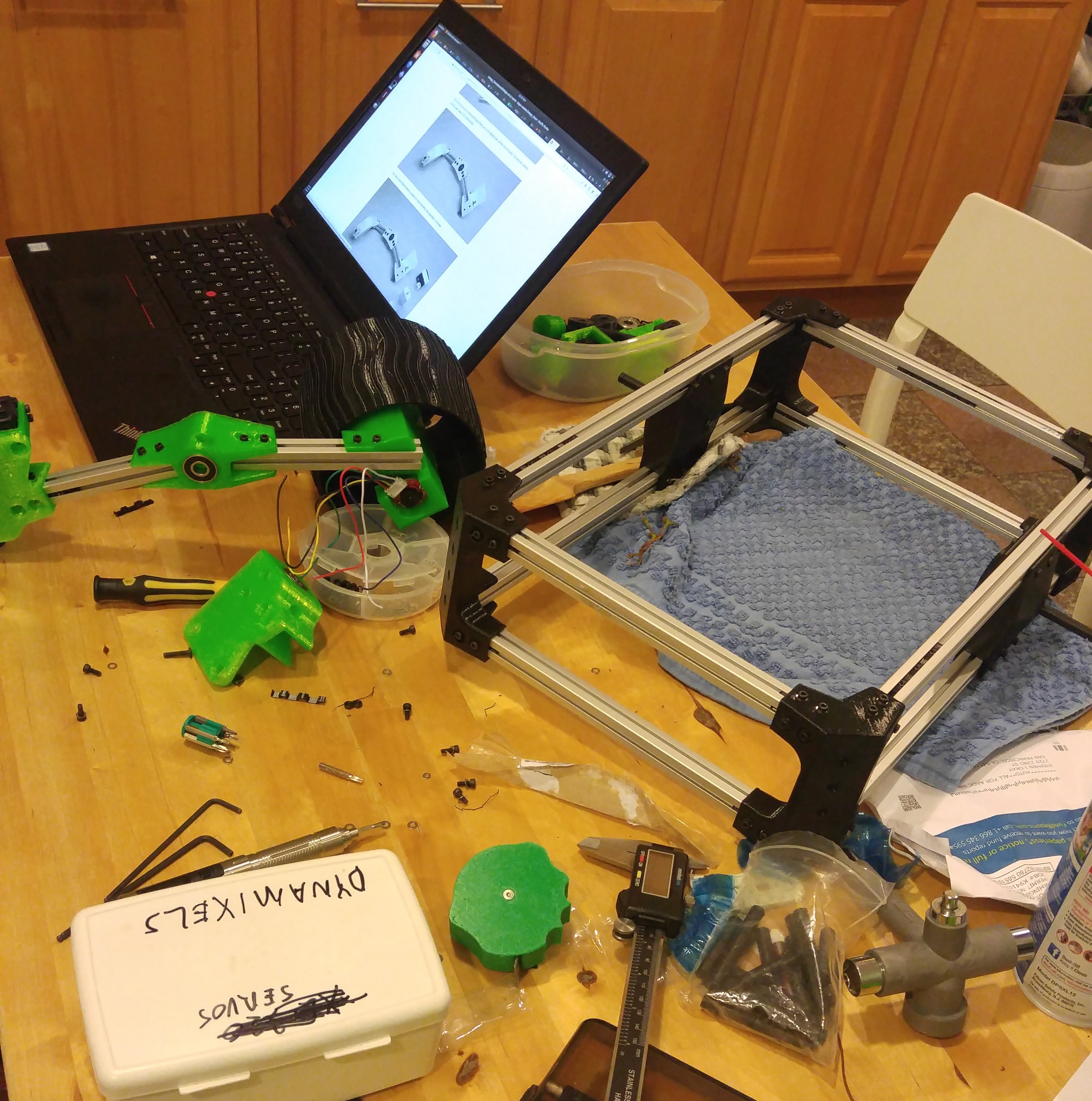
Anyway, here are a few random pics of my build process. My rover was printed on a Raise3D N2+. The wheels are PETG-CF from Matterhackers. The drive axles and steering shafts are NylonX(About which I'll write more later) . The rest of it is printed in PETG from a variety of suppliers.
All great projects start out on the kitchen table:
The all-important mechanical "backpack test", when it was still occupying whatever random corner in our apartment I could put it in that night.

I spent (and am just now finishing) a LOT of time on the wiring. I've built enough robots of significant size to know that organizing and "dressing" your cable runs will save a lot of debug time later.
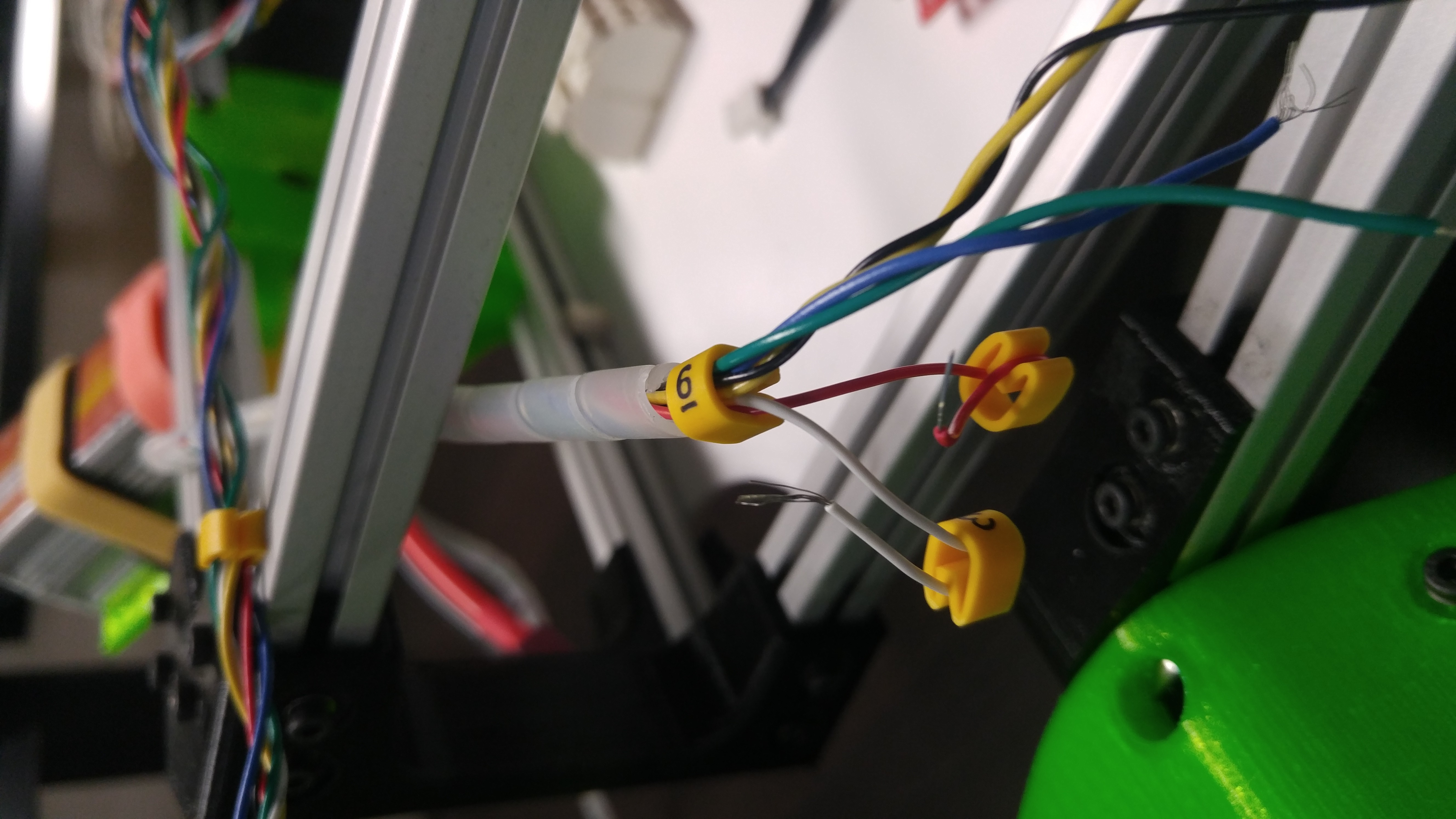
Anyway, this is kind of where we are right now. I'm expecting to wrap up the wiring in the next couple days and start some motor tests followed by actual roving Real Soon Now.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.