 DIY GUY Chris
DIY GUY ChrisHey guys! I Hope you already enjoyed my previous project "ELECTRONIC CHRISTMAS TREE" and you are ready for a new one, as usual I made this tutorial to guide you step by step while you make your own robot and to start learning how controlable robots are made and how to control them as well, this project could be a great start in robotics world.
During the making of this project, we tried to make sure that this instructable will be the best guide for you in order to help you if you want to make your own robot, so we hope that this instructable contain the needed documents. This project is so handy to make specially after getting the customized PCB that we’ve ordered from JLCPCB to improve the appearance of our electronic device and also there is enough documents and codes in this guide to allow you create your beautiful robot. We've made this project in just 4 days only, just one days to get all the needed parts and finish the hardware making and the assemble, then one day to prepare the code to suit our project and two days to create the android app then we have started the testing and the adjustments.
What you will learn from this instructable:
- Making the right hardware selection for your project depending on its functionalities.
- Understand the robot mecanisme.
- Prepare the circuit diagram to connect all the choosen components.
- Solder the electronic parts to the PCB.
- Assemble all the project parts (robot body).
- Start the first test and validate the project.
Step 1: Circuit Diagram
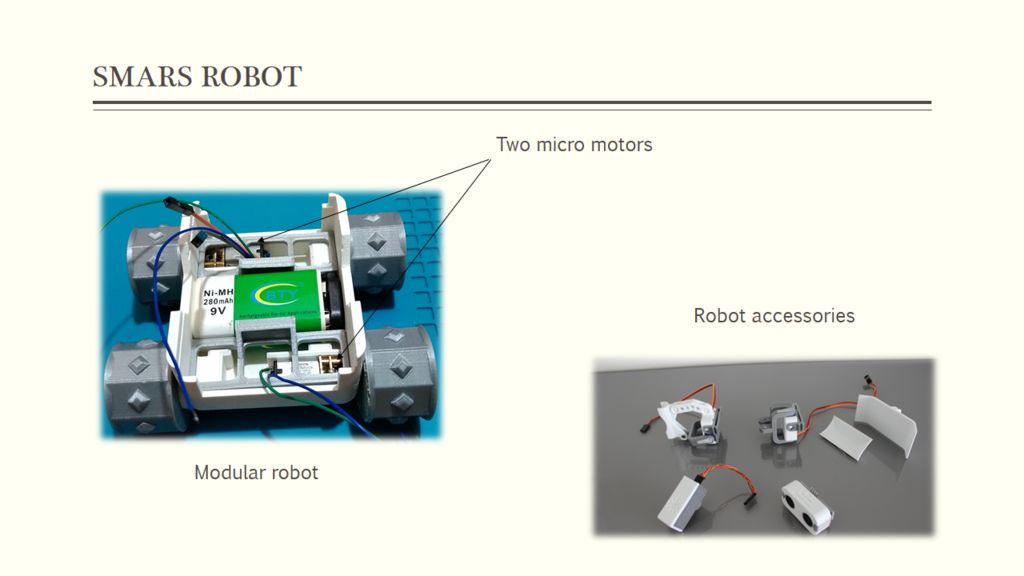
As always guys, I try to pick up some easy projects for the audience so everyone can try it and today’s project is easy as well, based on the 3D printed parts of the SMARS robot which is a small vehicle with two micro motors and there is lots of designs that you can follow to make your own robot, and also about the accessories that you can add to your robot they are many but for our project we will start with the basic design so no much accessories in it, but we will post in the coming videos how to add more features to our small robot.
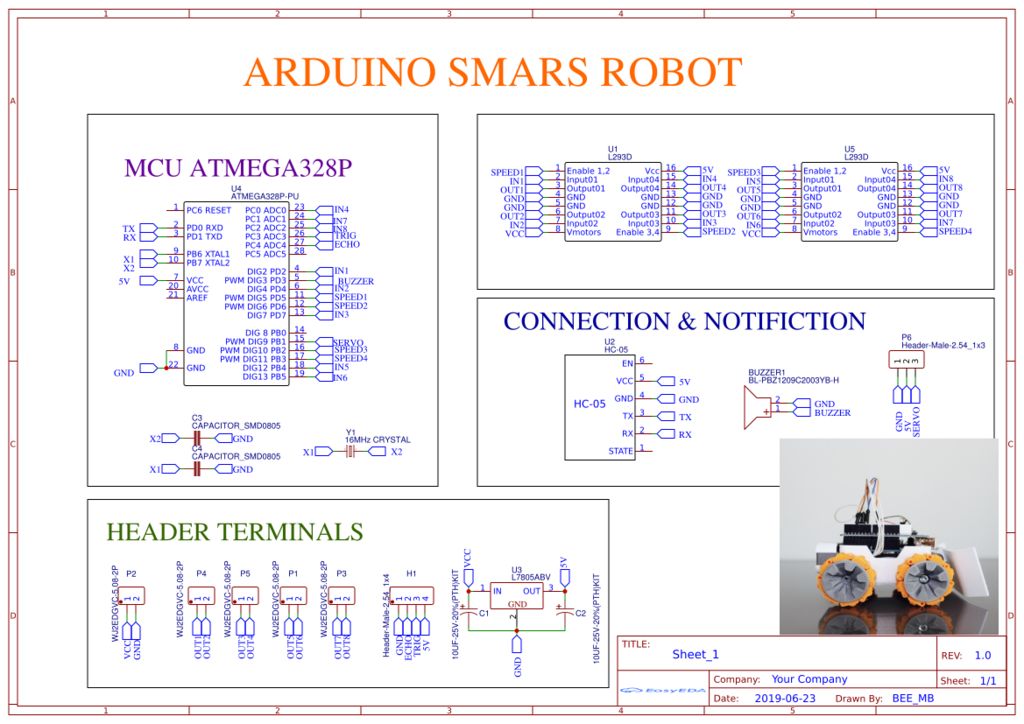
Moving to the control part, as it show the circuit diagram above, we will use an ATmega328 MCU that you can have from the Arduino UNO board, this MCU is driving the two micro motors through L293 H-bridge driver and as you can see I added two motor drivers so you can use this circuit diagram in case your robot is a four motors robot, also we have a buzzer output a servo motor output control, the Bluetooth connection pins and a ultrasonic sensor input, all these are features that you can play with when you produce the same circuit diagram.
Just one last component is the 5V voltage regulator which is required in here since we are using a 9V battery to power the robot and we need to dorp down the voltage to 5V for the power supply of the MCU and the motors.
Step 2: PCB Making



About JLCPCB
JLCPCB (Shenzhen JIALICHUANG Electronic Technology Development Co., Ltd.), is the largest PCB prototype enterprise in China and a high-tech manufacturer specializing in quick PCB prototype and small-batch PCB production. With over 10 years of experience in PCB manufacturing, JLCPCB has more than 200,000 customers at home and abroad, with over 8,000 online orders of PCB prototyping and small quantity PCB production per day. The annual production capacity is 200,000 sq.m. for various of 1-layer, 2-layer or multi-layer PCBs. JLC is a professional PCB manufacturer featured of large scale, well equipment, strict management and superior quality.
Talking electronics
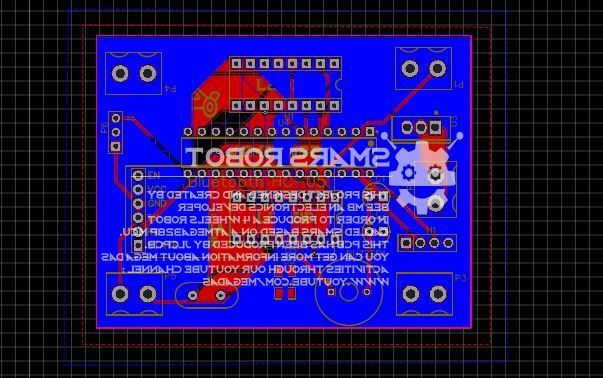
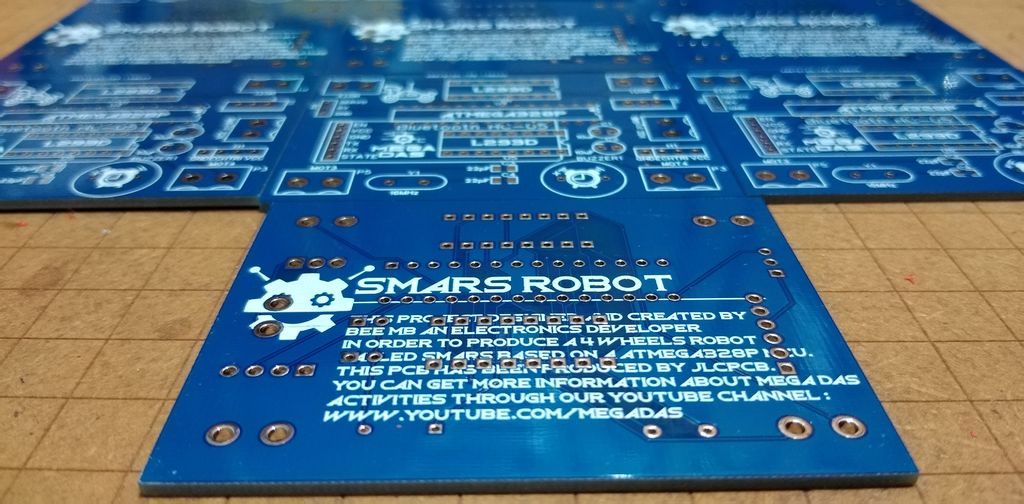
After preparing the circuit ,I transformed it into a customized PCB design and the easiest task now is to place the order for the PCBs so I need is to move to JLCPCB the best PCB supplier in order to get the best PCB manufacturing service, as always just some simple clicks that’s all what you need to uploaded the GERBER files of the circuit design then I moved to set some parameters and this time we will use the blue color for this PCB, Just four days after placing the order and my PCBs are on my desktop.
The packing, the shipping and all the production steps are performed very well to produce these beautiful PCBs..
Related download files
As you can see in the pictures above the PCB is very well manufactured and I’ve got the same PCB design that we’ve made for our main board and all the labels,logos are there to guide me during the soldering steps. You can also download the Gerberfile for this circuit.
Step 3: Ingredients


Before start soldering the electronic parts let’s review the electronic components list for our project so we will need:
- The PCB that we have ordered from JLCPCB
- One Arduino Uno : https://www.amazon.com/gp/product/B008GRTSV6/ref=a...
- ATmega328 MCU : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- L293 motor driver : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- HC05 Bluetooth module : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- L7805 voltage regulator : https://www.amazon.com/gp/product/B07BDFMQF6/ref=a...
- 2 through-hole capacitors 10 uF : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- 16 Mhz oscillator : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- Buzzer : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- 2 DC micro-motors : https://www.amazon.com/gp/product/B01263IMU8/ref=...
- 9V battery : https://www.amazon.com/gp/product/B01263IMU8/ref=...
And we will need the robot 3D printed parts
Step 4: Hardware Assembly


Now everything is ready so let’s start soldering our electronic components to the PCB and to do so we need a soldering iron and a solder core wire and a SMD rework station for SMD components.
Safety first
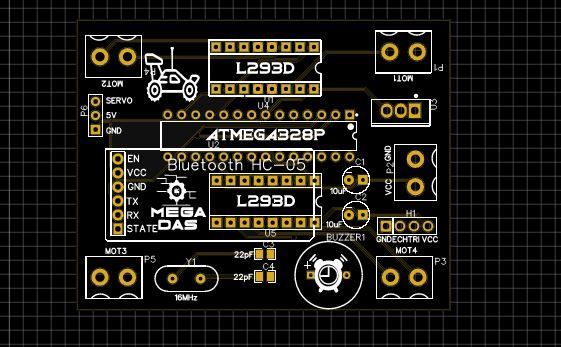
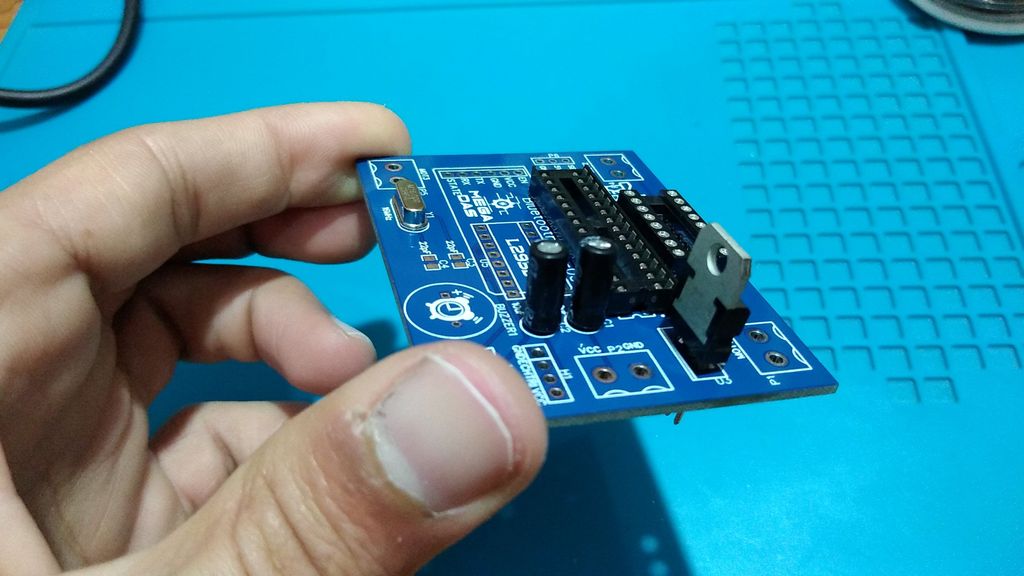
Soldering Iron Never touch the element of the soldering iron....400°C! Hold wires to be heated with tweezers or clamps. Always return the soldering iron to its stand when not in use. Never put it down on the workbench. Turn unit off and unplug when not in use. As you can see, using this PCB is so easy due to its very high quality making and without forgetting the labels that will guide you guys while soldering each component because you will find on the top silk layer a label of each component indicating its placement on the board and this way you will be 100% sure that you will not make any soldering mistakes.I’ve soldered each component to its placement and you can use both sides of the PCB to solder your electronic components.
Step 5: Robot Body Assembly











We continue the assembly of our robot parts and we will start with the wheel’s chain we need these 32 chain parts 16 parts for each side and we used this plastic Filament which we have cut 30 parts of it, each part has a 15 millimeters of length and we hold the chain parts together, you can use some glue to ensure that the chain stay attached, now we take the robot chassis and these two free wheels and we assemble them together, after that we put the 9V battery and the micro motors to them placements and we assemble the active wheels to the motors, last but no least we put the chain to connect the wheels to each other, the last step is screwing the wheels wires and the 9V battery then we insert the PCB to its socket and our robot is ready to move now.
Step 6: Software Part & Test



it’s time to move to the software part I have made this Arduino code that you can get from the download link below, it is so basic code, just some instructions to receive from the android app in order to control the movements of the robot, now all what we need is to place the MCU in an Arduino UNO board and we upload the code to the microcontroller then we take it back to its socket on our PCB.
We will post in the coming videos more features added to our robot, as you see guys today’s project is so easy to make and an amazing one and we recommend it for you guys if you want to start playing with controllable robots. But still some other improvements to perform in our project in order to make it much more butter, that’s why I will be waiting for your comments to improve it, do not forget to visit to our YouTube channel for the chance to be the month winner of our giveaway program.
One last thing, make sure that you are doing electronics every day.
It was BEE MB from MEGA DAS see you next time.