 John Opsahl
John OpsahlThis next revision of the forearm door pull is the most promising design of this project. It incorporates many of the successful design features and avoids many of the pitfalls of previous designs.
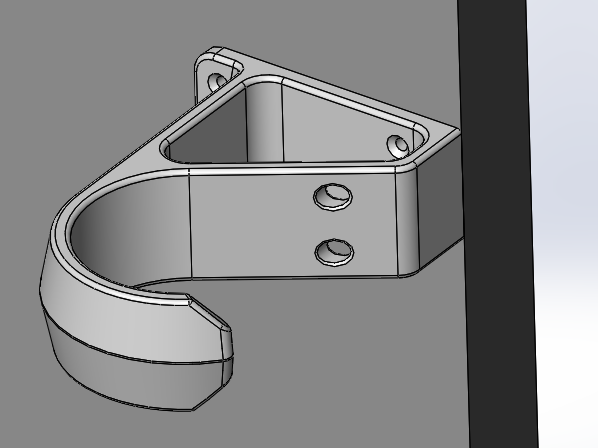
The forearm door pull is installed at the edge of the door as shown in the image below. A low volume, high stiffness (and 3D printable without supports) triangular profile is used along the curve of the hook. The hook is inset from the edge of the door so as not to create a catch hazard when the user enters the door. A small straight section at the base of the hook spaces the user's hand away from face and edge of the door as the user swings the door open and releases their forearm from the hook. It has a wide face on the front of the hook so if someone entering the door swings it into someone trying to leave through the door there is less likelihood of causing injury.
To achieve a total print time of less than six hours, I reduced the height from 60mm to 50mm, decreased the nominal wall thickness from 8mm to 7.5mm, and decreased wall thickness from 0.8mm to 0.6mm. Even with these reductions, the strength of the part is more than sufficient.
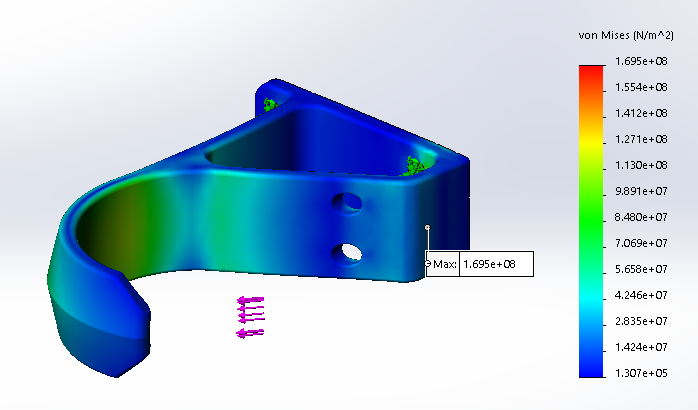
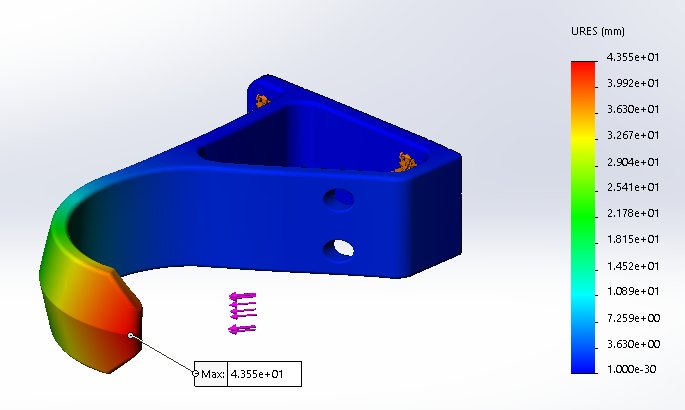
Stress and deformation checks showed no red flags. The simulation used fixed supports at the bolted connection to the door and a 900N (200lb) force at the tip of the hook.
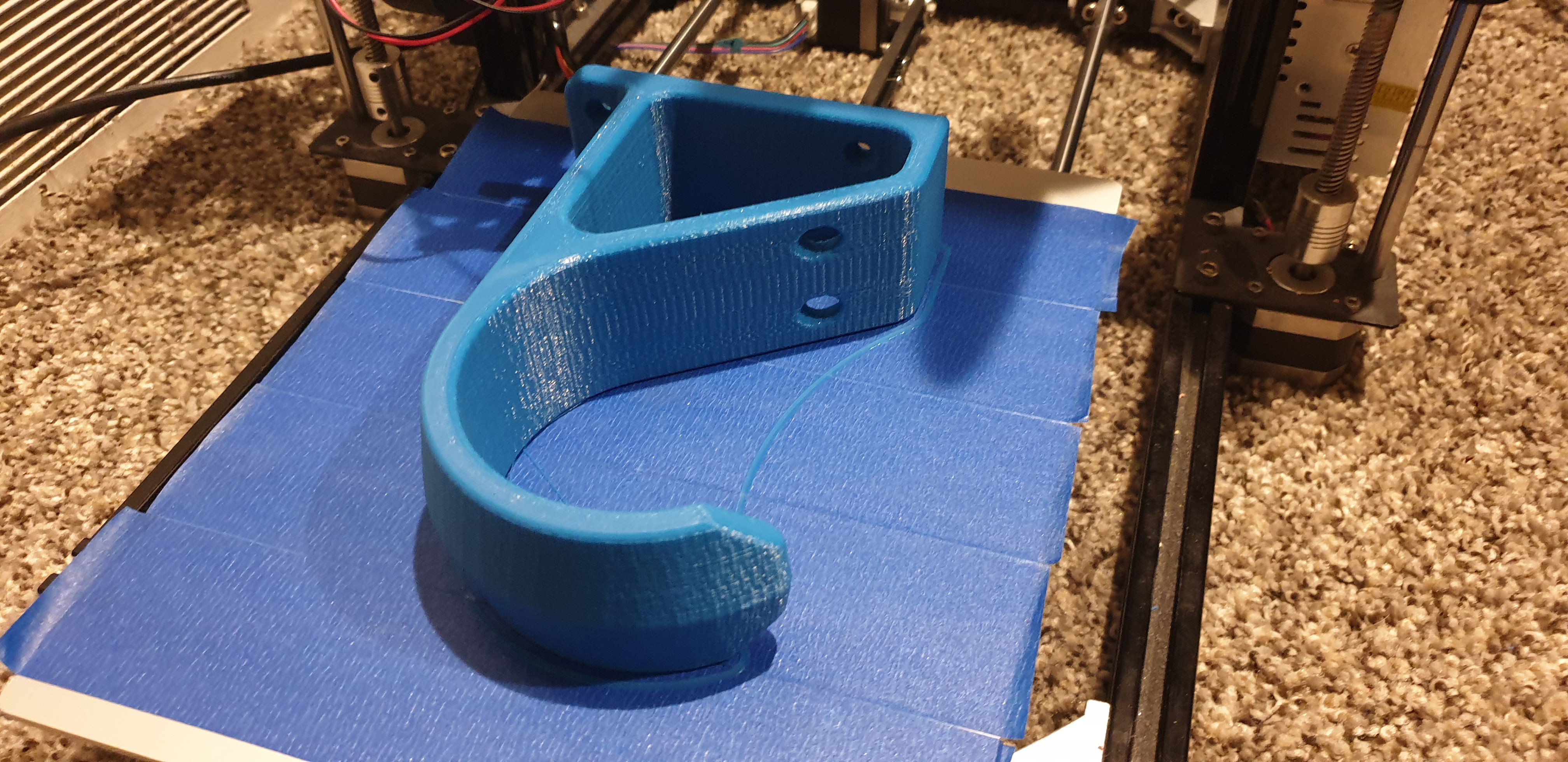
It ended up printing in five hours and fifty minutes at 30% infill and 0.6mm wall thickness. The hook deflects more than the previous design if I pull on it with my hands, but I suspect the additional deflection will not be an issue.
You know it's a good build when you solved all the previous issues and struggle to find any new issues. I am pleased with how this design turned out.
The door pulls I have investigated so far assume that there is not a latching mechanism on the door. Bathroom doors and entrance doors to buildings are examples of doors without latching mechanisms. Residential front doors and internal building doors are examples of doors that use latching mechanisms. The next great design challenge of this "hands free" project is to develop a foot or forearm operated door latching/unlatching mechanism.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.