 Val
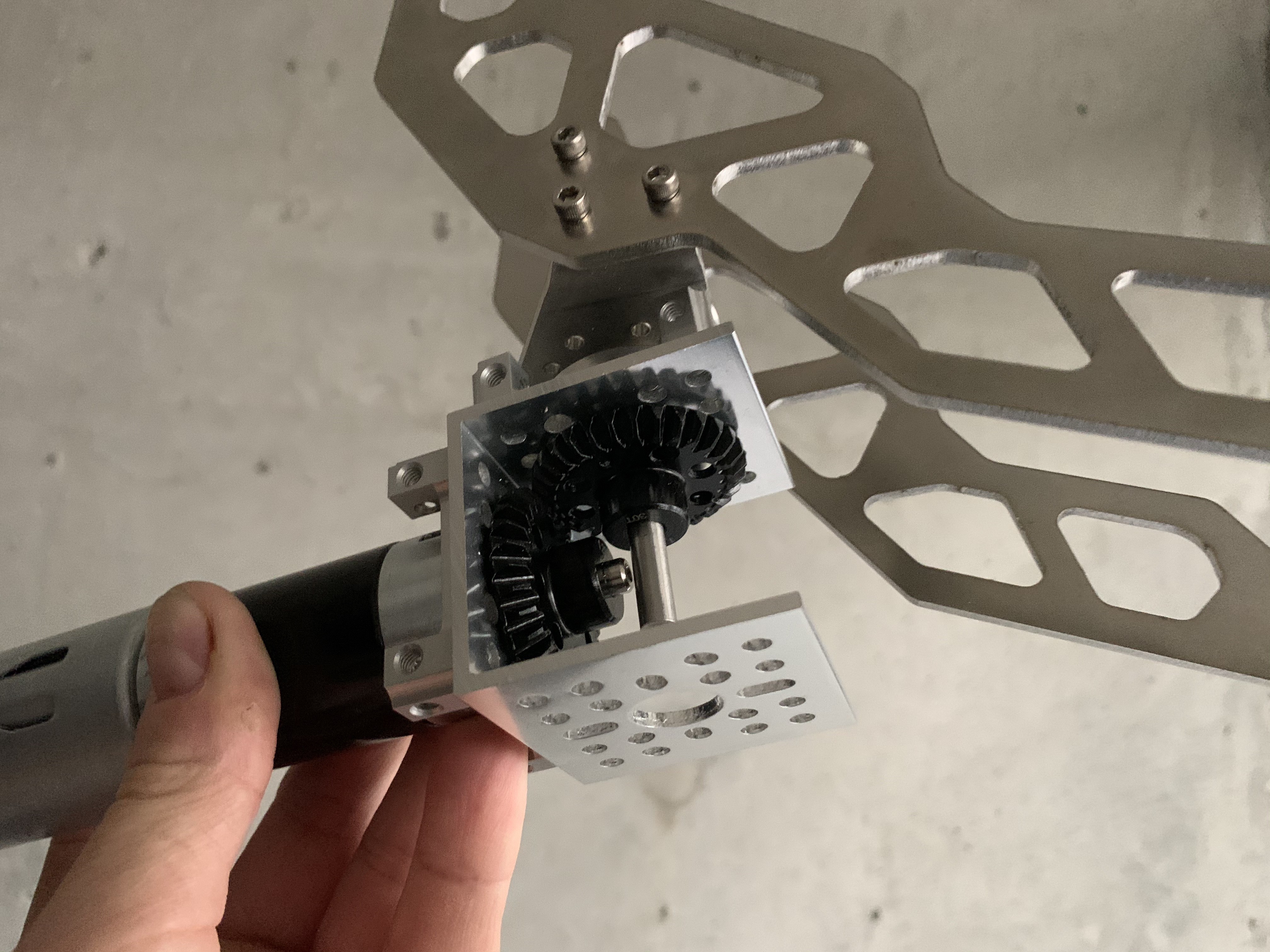
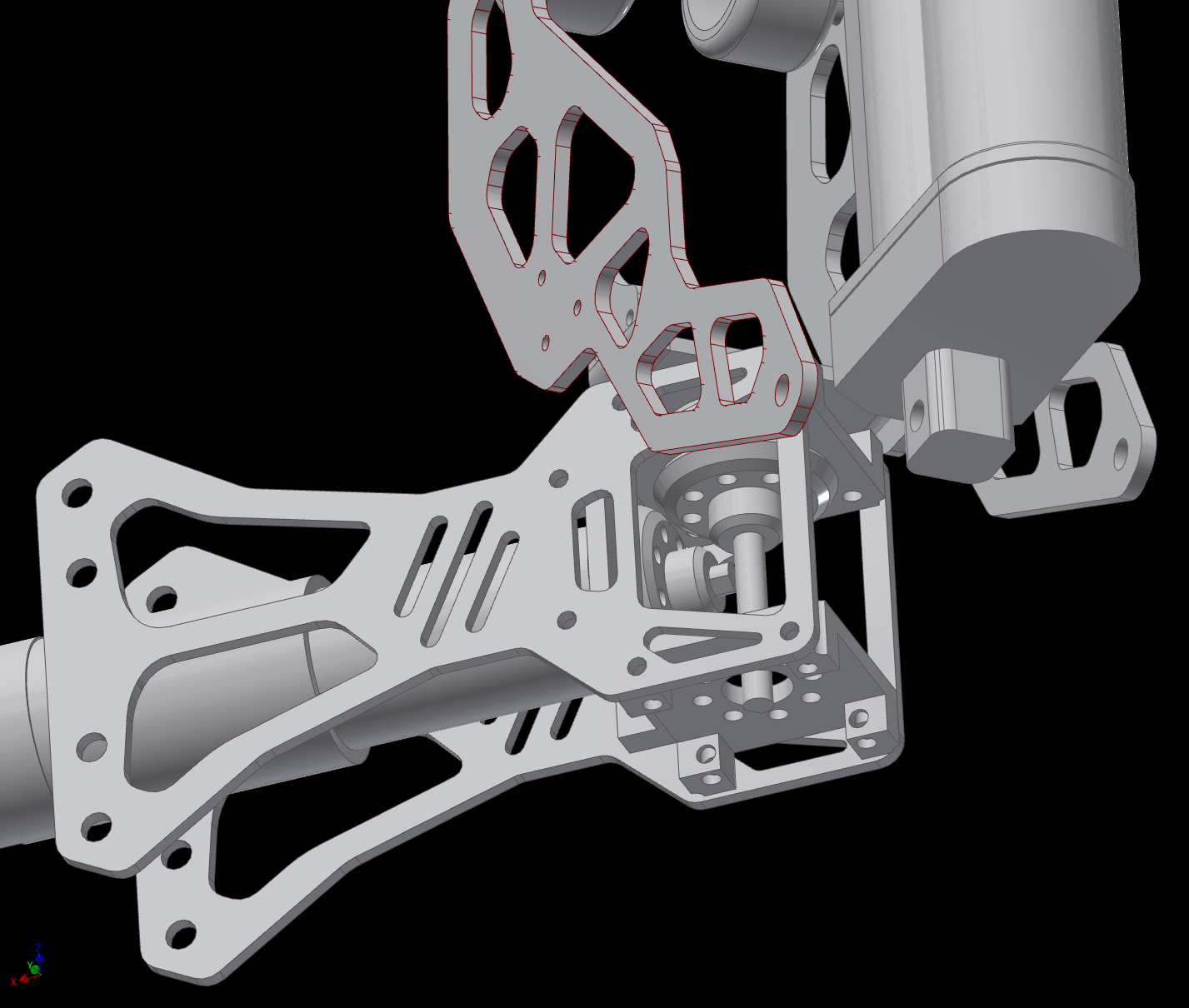
ValLast week I made a decision to use a new shoulder motor, so I had to re-design the shoulder to put the motor sideways:
This week I added source code to read a hollow shaft potentiometer while rotating the motor so that I could stop using an inaccurate metric of PWM "time" to guess the position of the arm, and the performance has been less than acceptable. I already spent two weeks looking for an absolute encoder to read servo positions and this one was the best I could find:
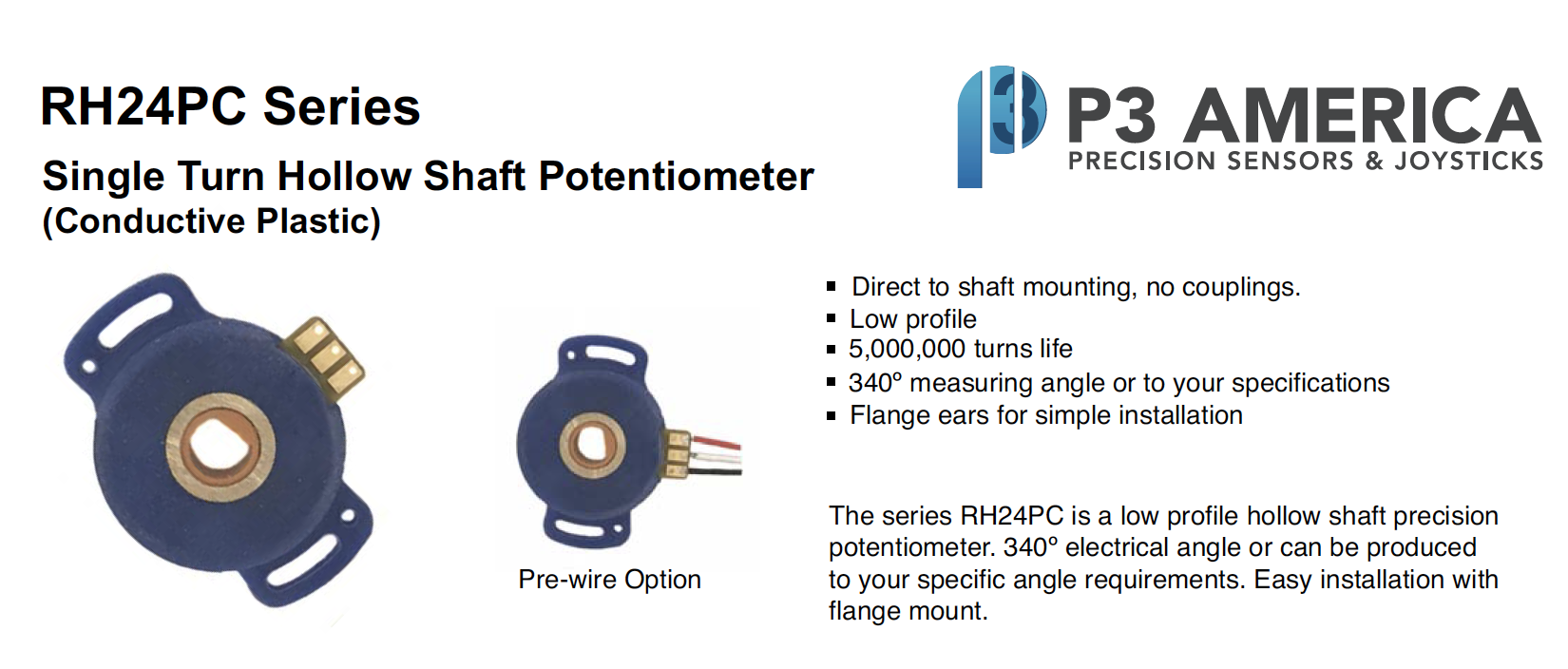 So now, it looks like I'm forced by build my own encoders. All others are either giant and bulky, or have really difficult legacy programming interface.
So now, it looks like I'm forced by build my own encoders. All others are either giant and bulky, or have really difficult legacy programming interface.I settled on AS5045, so I will have to design my own board for this chip in Eagle Cad (after I learn Eagle Cad) and manufacture my own housing that's really compact and easy to fit anywhere.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.