 Andrei Gramakov
Andrei Gramakov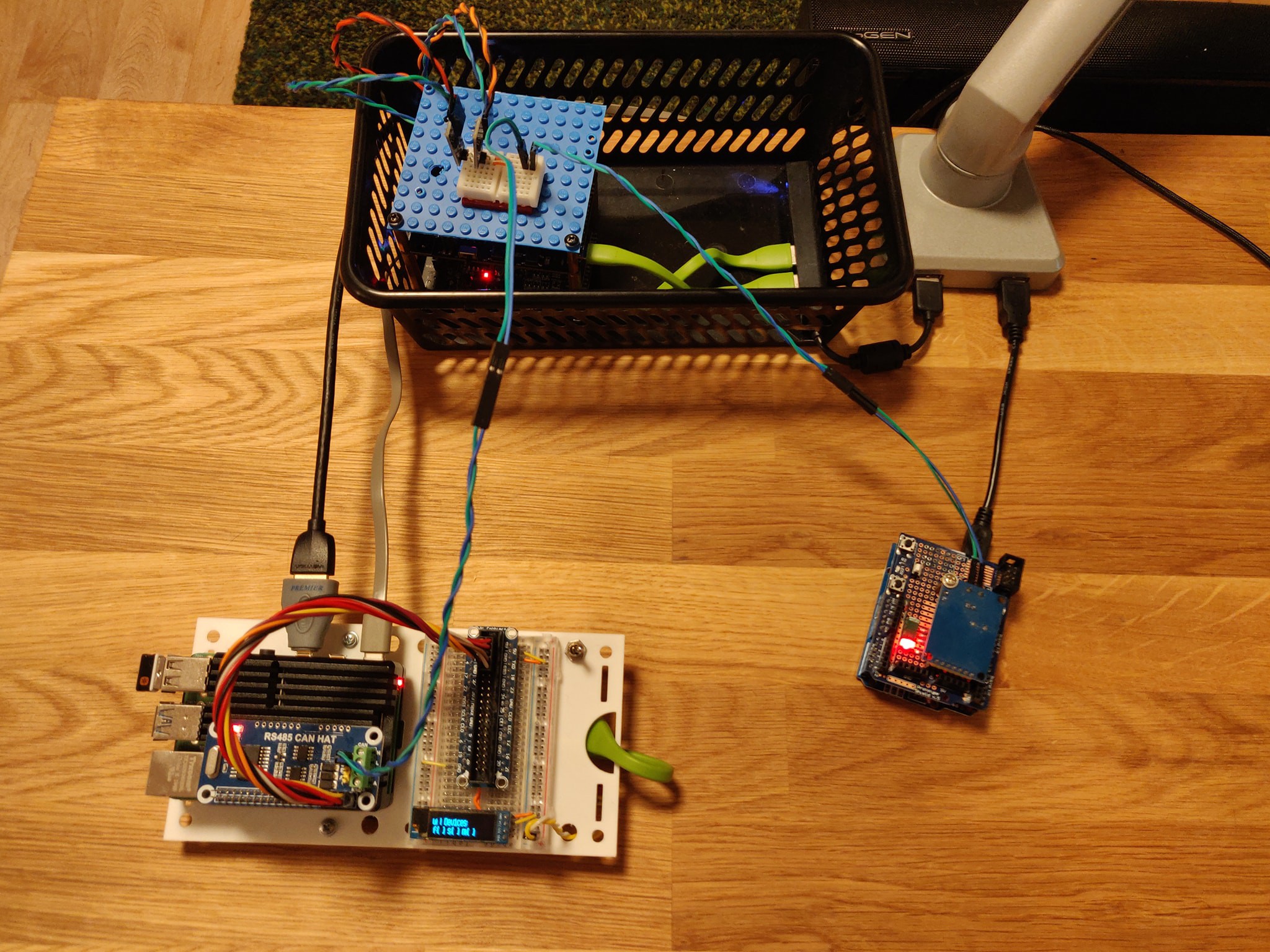
In the upper part there are two ESP32 stacked together, bellow there is a Raspberry Pi with my new CANbus hat and a CAN test tool.
The Raspberry part needs some tweaks from the Linux side plus a python CANbus subpackage. ESP32 Can library works excellent.
Since it is needed to write a library for STM32, Arduino, and who knows what else I want to build an Arduino-based CAN test/verification tool (lower right corner). The hardware is ready only code remains.
The main project of the transition from I2C to CAN is here, many things need to be done.
https://github.com/users/an-dr/projects/3
Want to join development? See links below!
https://github.com/an-dr/zakhar_service (Python, Linux)
https://github.com/an-dr/zakhar_pycore (Python)
https://github.com/an-dr/zklib_espidf_canbus (C/C++, CAN, ESP32)
https://github.com/an-dr/zakhar_tools (C++, Arduino, Hardware)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.