 Eric Wiiliam
Eric WiiliamSince I will be doing the ground YAGI and an air-unit version I spent some time testing the UAV to carry the payload.

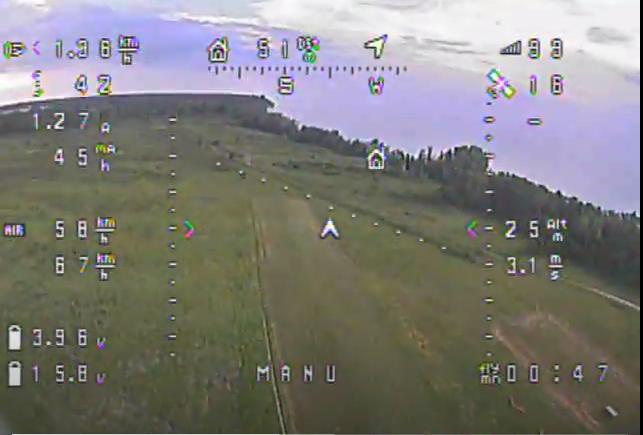
The Nano Talon is still my aircraft of choice here and I've finally made some time to properly finish setting up the autopilot and antonymous modes. Last night I took a quick tuning flight with the air unit in the belly storage (no ground communication from the ESP-82666 though).
Setup video: https://photos.app.goo.gl/ZQPJnyyMeQhym54D9
The aircraft is broadcasting two telemetry downlinks in this test. One is my ~900MHZ control link which has full telemetry of all aircraft signals back to my radio and a second which allows monitoring and control via 433MHZ. Both worked perfectly. You can see the thunder storms building around me as I performed an auto trim cycle which centers the control surfaces for my new payload in flight.
https://photos.app.goo.gl/KsjNefCDpH9coqWx6
Full DVR video: https://photos.app.goo.gl/KsjNefCDpH9coqWx6
Ultimately my video downlink failed and I have ordered a new diversity receiver module for my goggles as well as dropped the power output down on the VTX as it has been overheating in this >34C heat lately. The new video receiver will be here next week and should work better in all conditions since it will now "stitch" together the two video feeds from my patch and my omin-directional antennas in to one much cleaner video. Happy days.
I have been working on the handheld unit as well so update on that soon. I was able to get the logging working properly and GPS also tested. So far- it seems like I should be able to finish it up soon.
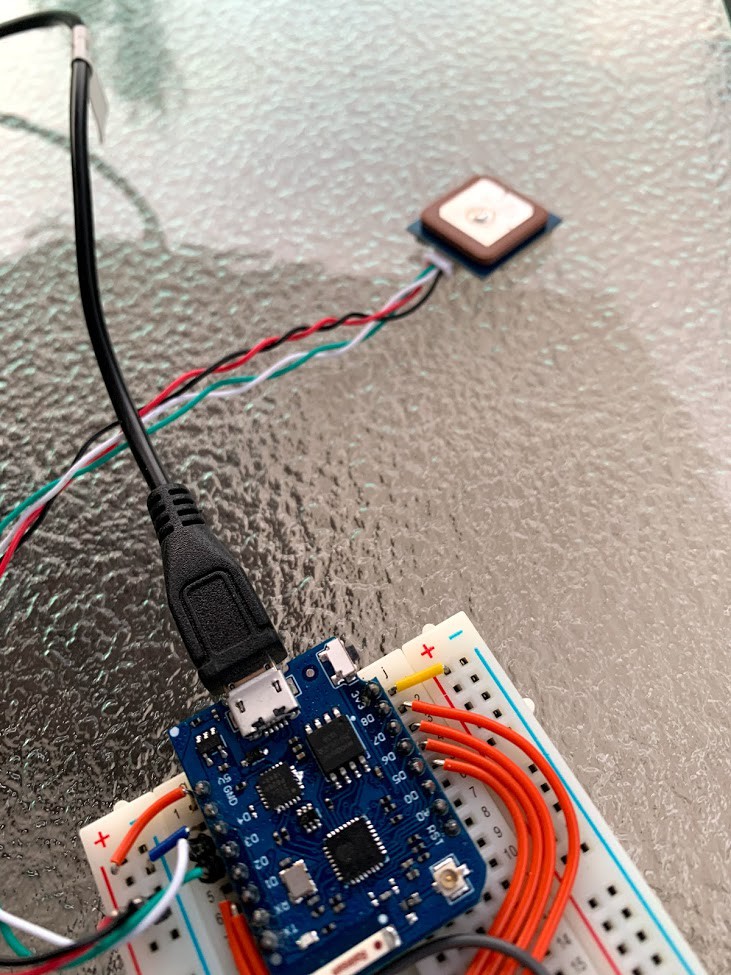
Just need to make a case for the air unit and decide if I want to do live telemetry via LORA radio or just store the data on the SD card on the aircraft. Lots of options here where I can even link multiple receivers or do more crazy stuff.
Fist step is to finish the code...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.