 Maximiliano Rojas
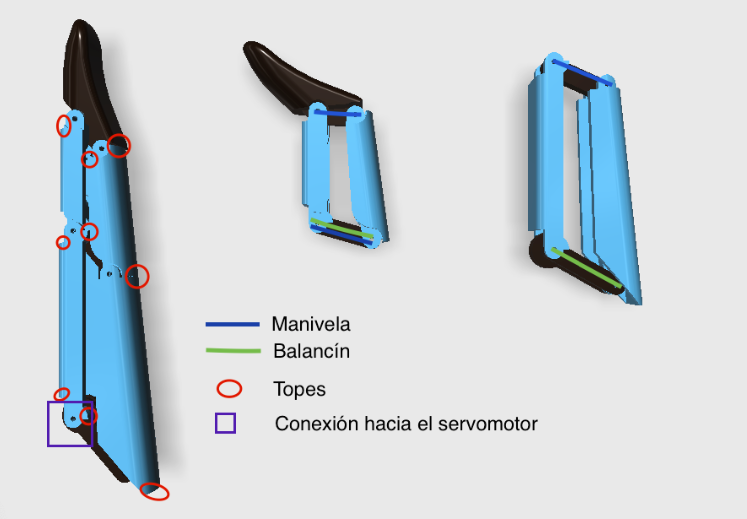
Maximiliano RojasTo understand how the mechanism of the finger works os important to now this mechanism:
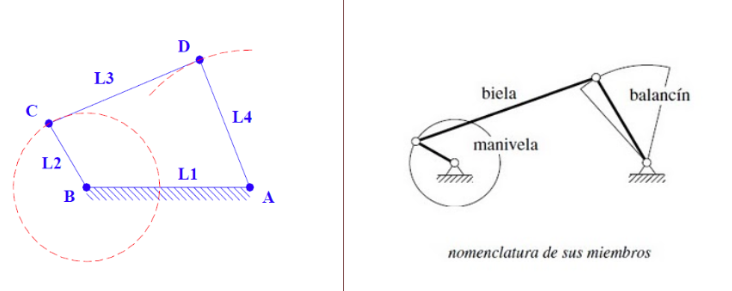
This is a four link mechanism that, due the difference of length, the angles of the two grounded links are different, this reduce the torque, but with a single motor of 180º (like those tiny blue ones of 1.7 kg-cm) the hole finger can be controlled, unfortunately the position of the end effector (the tip) is not very precise, but the mechanism can adapt the finger tot he form of what is cough by the Hans, this implies that for large objects the fingers adapt this inner angles to accomplish a very good grasp, but tiny object can't be grasped very well.
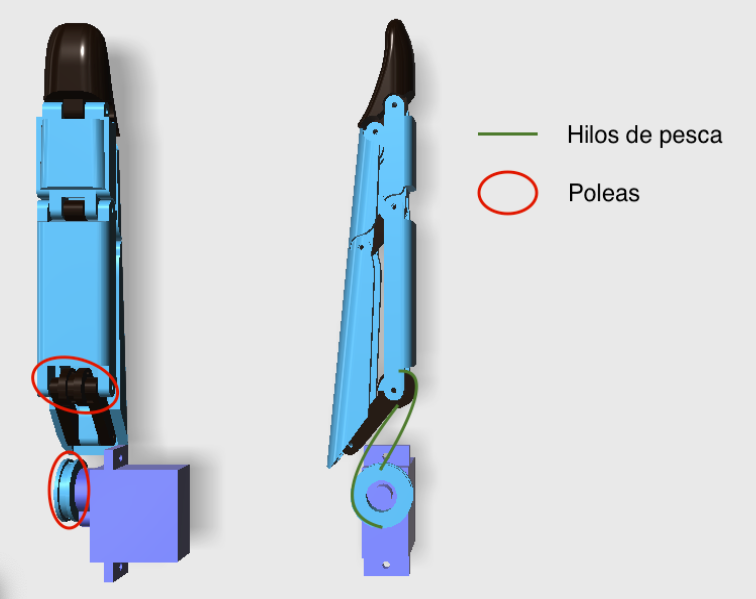
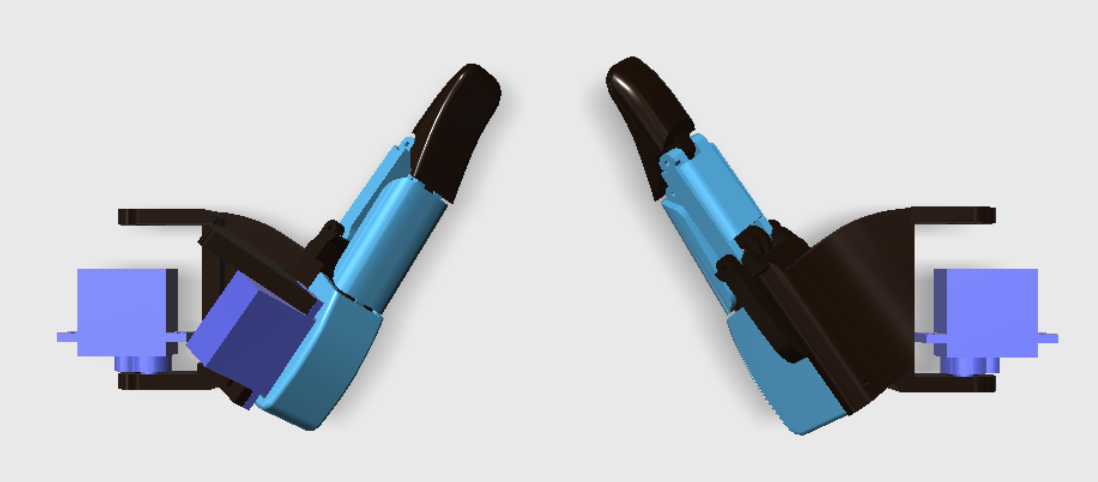
The union of the finger with the servomotor is through plastic fishing wire:
The thumb finger has an extra motor to rotate it into the palm:
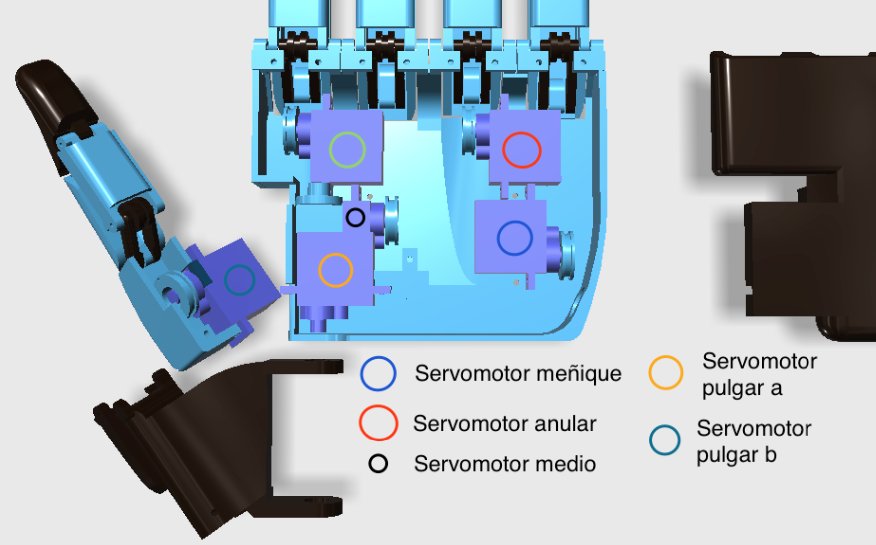
The motors are placed inside the hand, the internal spacial disposition is:
An important detail is that, as you can see in the gifts in the main page of this project, there are a black thing in the fingers and palm, those are parts of balloons, as I say above, the final torque of each hand isn's very powerful, so, How can it grab , for example, a bottle of water? The balloons act as skin, and due it high superficial friction, this can hold "heavy" objects without problem.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.