 Fabian
FabianIt has been a little quieter here lately. But that wasn't because I was idling. :D In the meantime, the pitch actuator has gone through three iterations. But more on that later.
The last few weeks I've mainly worked on the pitch actuator but also on the wind vane. I have finished a draft for the wind vane and have already partially assembled it. More about this in a separate log. :)
In addition to the (hopefully final) design for the pitch actuator, I also worked on the brake actuator for the Nerdiskerator. I will post more on the nerdiskerator's project log soon. (Link: https://hackaday.io/project/172445-nerdiskerator-a-3d-printed-disk-generator)
The first design for the Pitch Actuator worked, but it took far too long to adjust the blades. The stepper motor needed almost ten minutes for a complete journey from end position to end position.
Clearly too slow to be able to react quickly to a rotation-speed change.
Pitch actuator Mark 2
So I thought I would just replace the stepper motor with a small DC motor. On the search for a motor I oriented myself more towards what I had available at home than what was needed for this purpose. Spoiler: I should have looked at the data sheet.
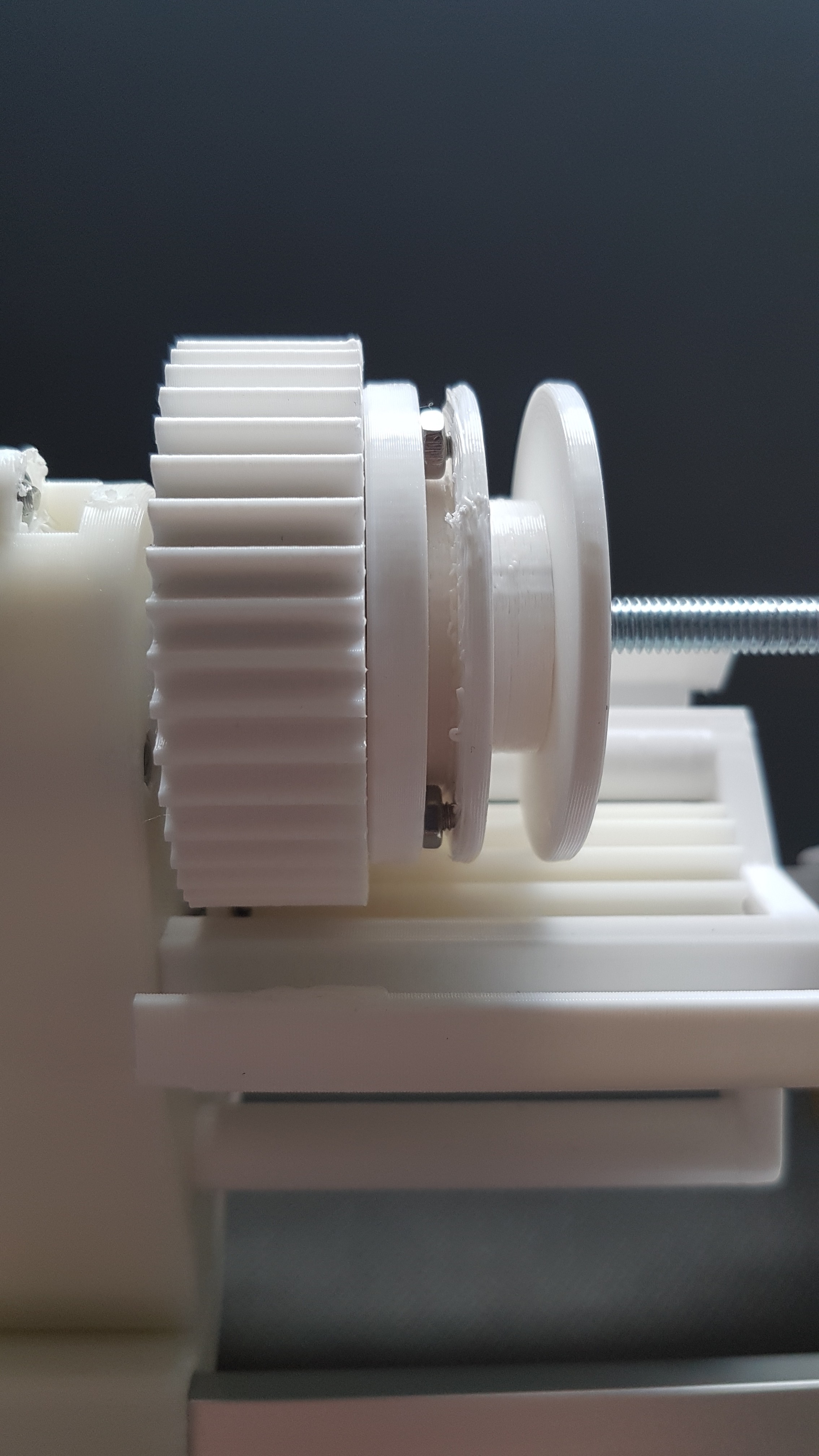
As you can see, the motor has enough speed for a quick adjustment. Unfortunately, a lot of torque was sacrificed to reach more speed. In addition, the motor draws almost 5A when it is blocked. Clearly too much. I have to admit that I chose the engine somewhat naively according to the motto "it will fit".
Pitch actuator Mark 3
So I went to the next draft. And with it to the next proof that before I start an additional printing process I should really check first that everything will fit. :D
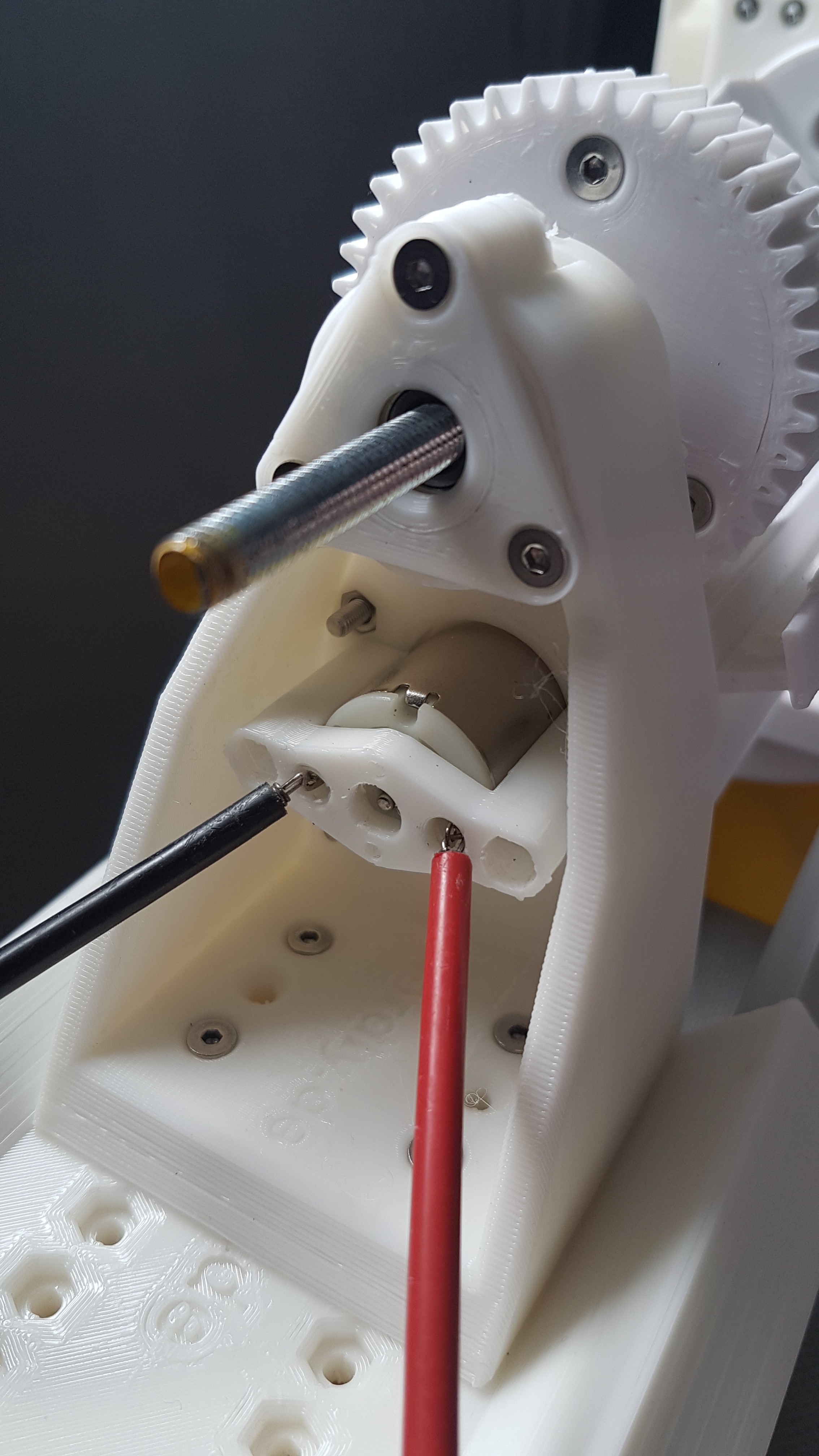
In this design I used the same gear motor that I use for the brake actuator of the Nerdiskerator. This already has a reduction of 1:48 integrated into the housing. The motor pulls 500mA when blocked. That fits perfectly with the I2C motor driver DRV8830 that I want to use for control.
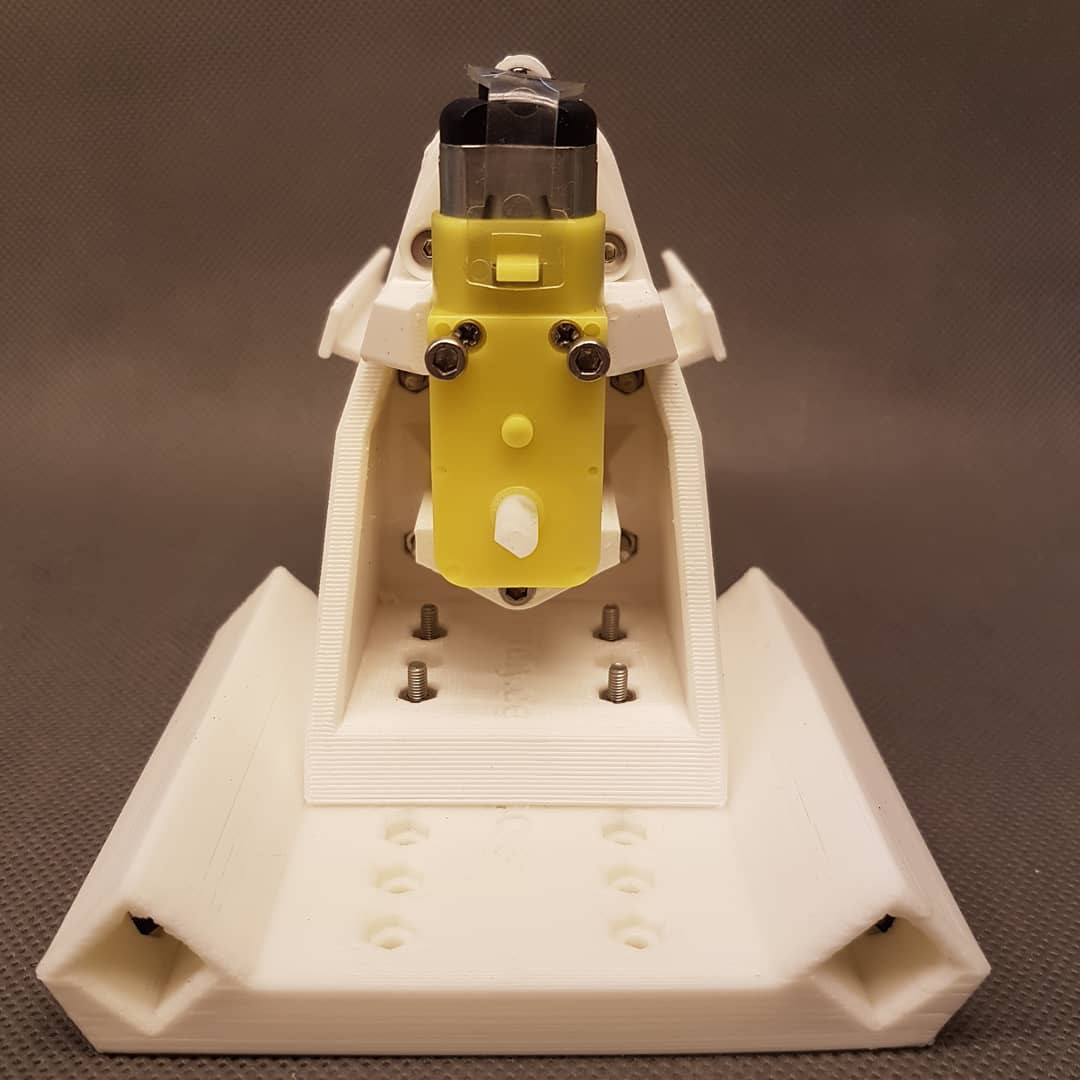
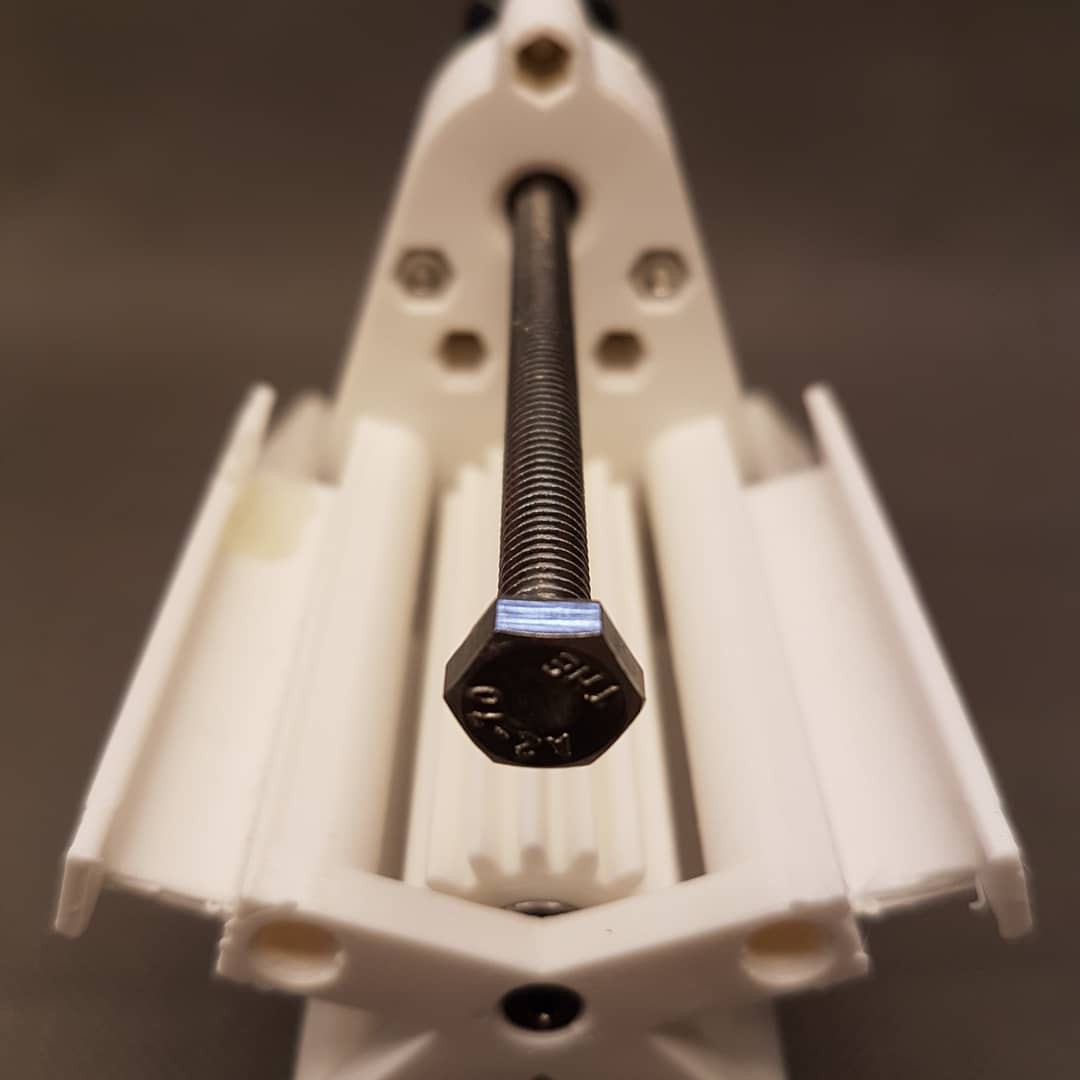
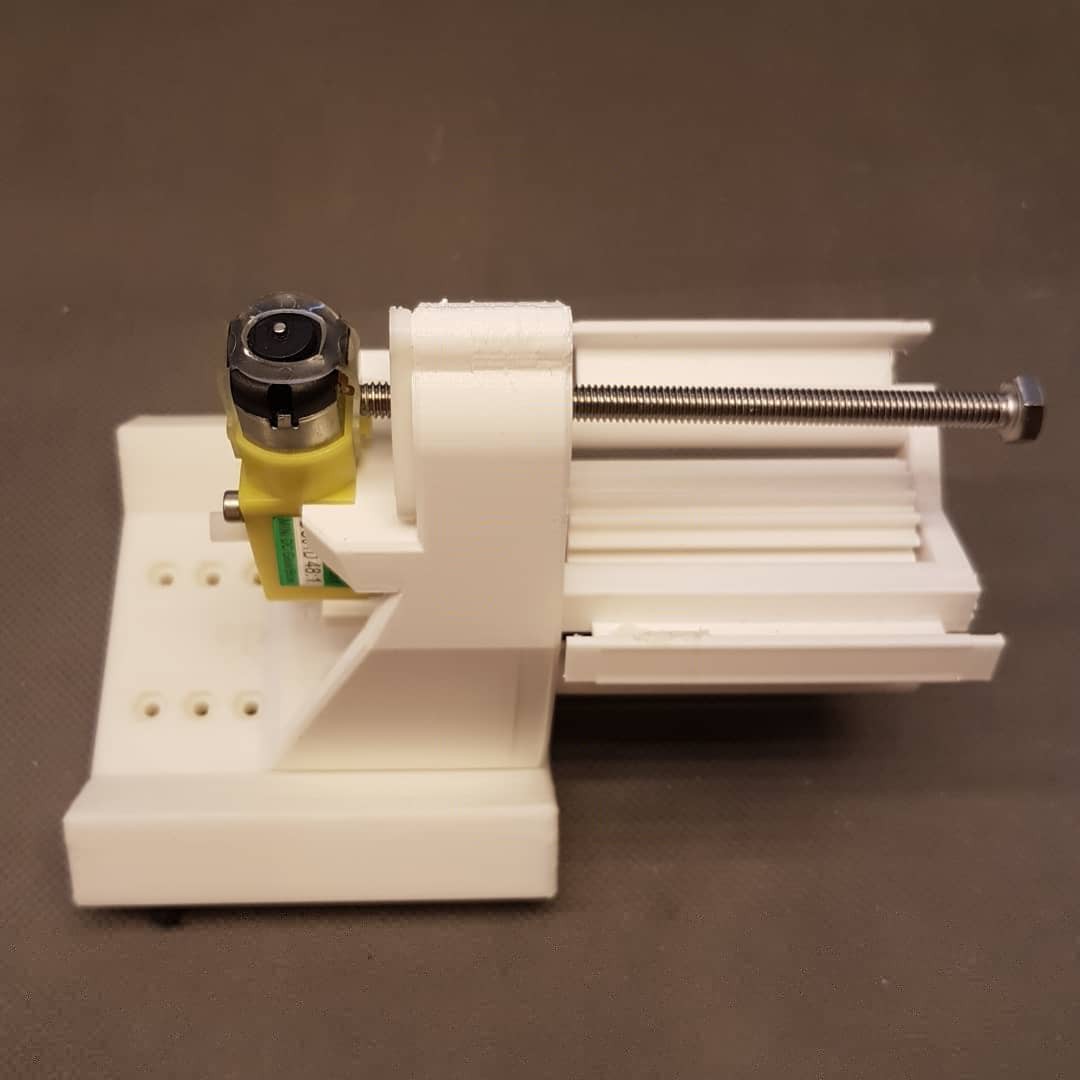
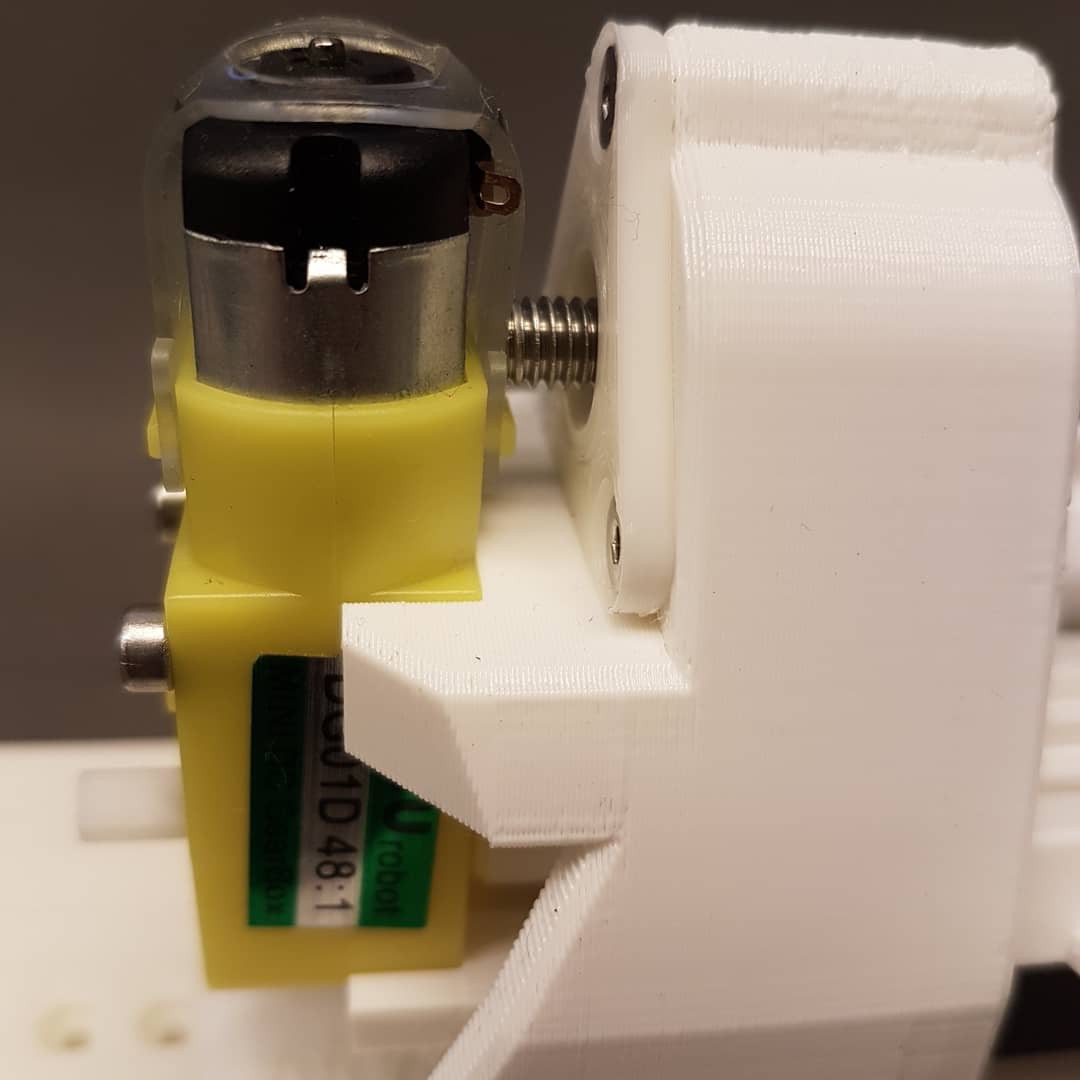
In the picture you can see that I did not notice that the vertically aligned motor would collide with the threaded rod when it was moved.
So...
Pitch actuator Mark 4
For the Pitch Actuator Mark 4, I basically just turned the gear motor by 90 degrees. Photos and videos will follow. :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.