 EK
EKThis week, prototyping has started! Here's an update on what's been happening so far from the mechanical side.
Read more for prototyping for experiment #1, the spool box mockup, gifs of waves, and more learnings.
Prototyping - Experiment #1
This week is experiment #1. The objective is to determine if a magnetically coupled piece will work through the enclosure. This means that the servo and electronics will remain watertight, and the outer piece will be in water. Stretch goal for experiment #1 is to try some super bright RGB LEDs, and observe the surrounding illumination in lake water.
We are going to be using a Nalgene water bottle for the prototype enclosure for the experiments, then ideally transition to a tube. The hope with a Nalgene is that it provides a somewhat accessible enclosure available off the shelf. The material, Tritan aka polycarbonate, can withstand a decent amount of pressure needed for testing. The lid however may prove to be weaker. (Might be able to 3D print the lid in stronger material though!)
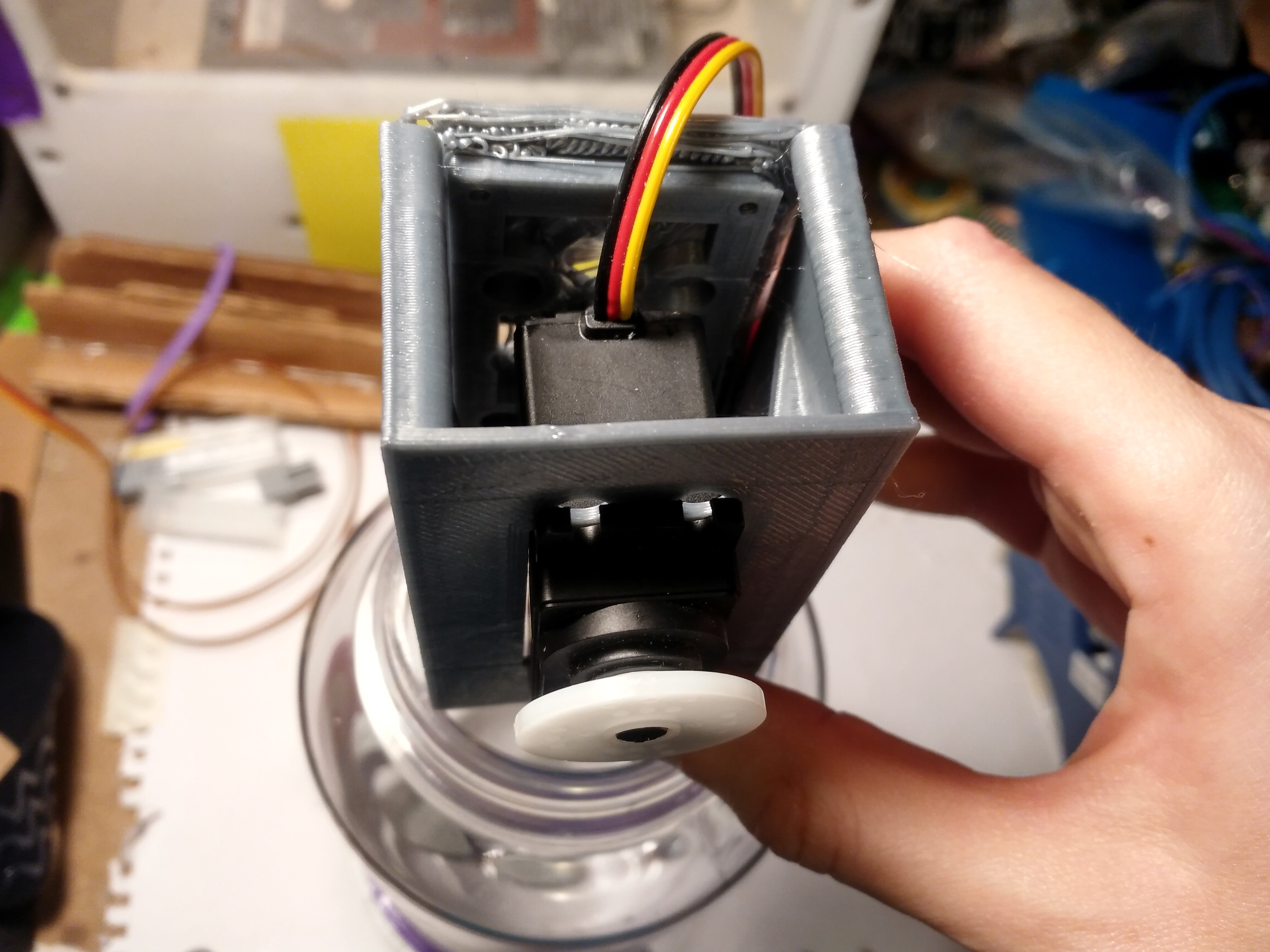
Here's the premise of the setup. There is a 3D printed piece that attaches in to the lid. Wooden dowels extend from this to provide structure that various stages could be added on to. Those stages will hold on to the battery, controllers, sensors, and the servo.
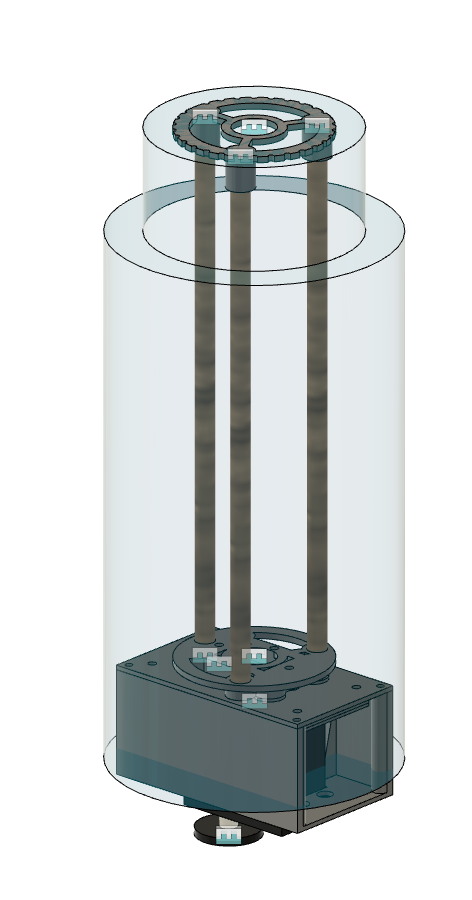 This model with the servo block extending beyond the enclosure clearly illustrates one of the major unknowns at the moment - which is how much space the servo block will take up. Once this is known, then the lengths of the wooden dowel can be adjusted properly.
This model with the servo block extending beyond the enclosure clearly illustrates one of the major unknowns at the moment - which is how much space the servo block will take up. Once this is known, then the lengths of the wooden dowel can be adjusted properly.Here are some embarrassing mistakes made so far ....... and don't worry, there's even more to follow ....... (Top left) Using a screw in the middle to clamp the lid to keep the magnets in - doesn't work, needs to be clamped from the other side of the circle. (Bottom left) Using krazy glue for the magnets and it not working, then needing hot glue - magnets no longer flush. (Right) Slicing and printing a part upside down.
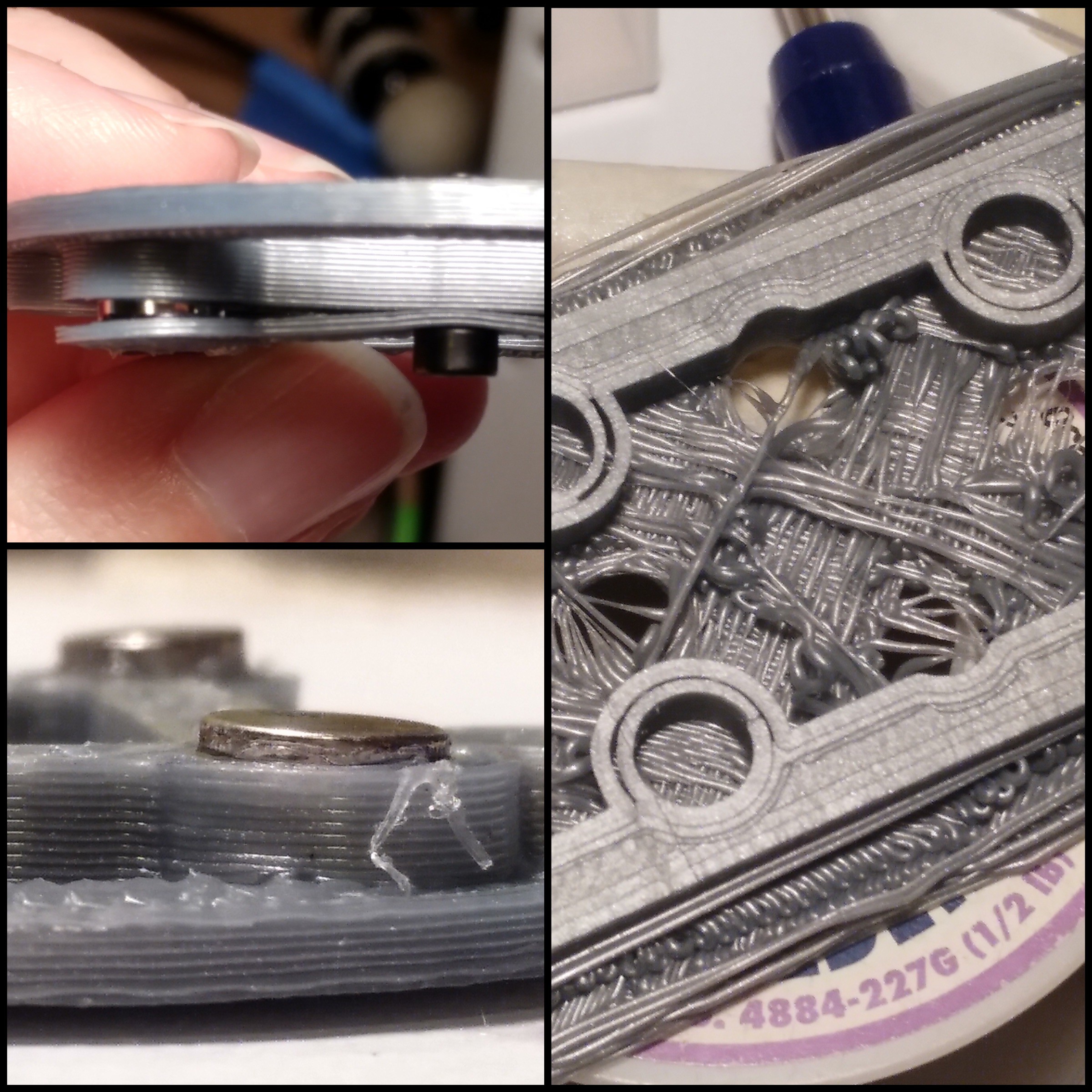
A better technique for the magnets would be to pause and insert them mid print, then resume. The reason why I went with the screws method was because I wanted to make the prototype quickly, and having everything printing off without closely monitoring it was faster. This can be done for future prototypes if the experiment works. Additionally, can change the magnet sizing parameter in the design, and maybe it can hold with friction. Here are the magnet sizing tests.
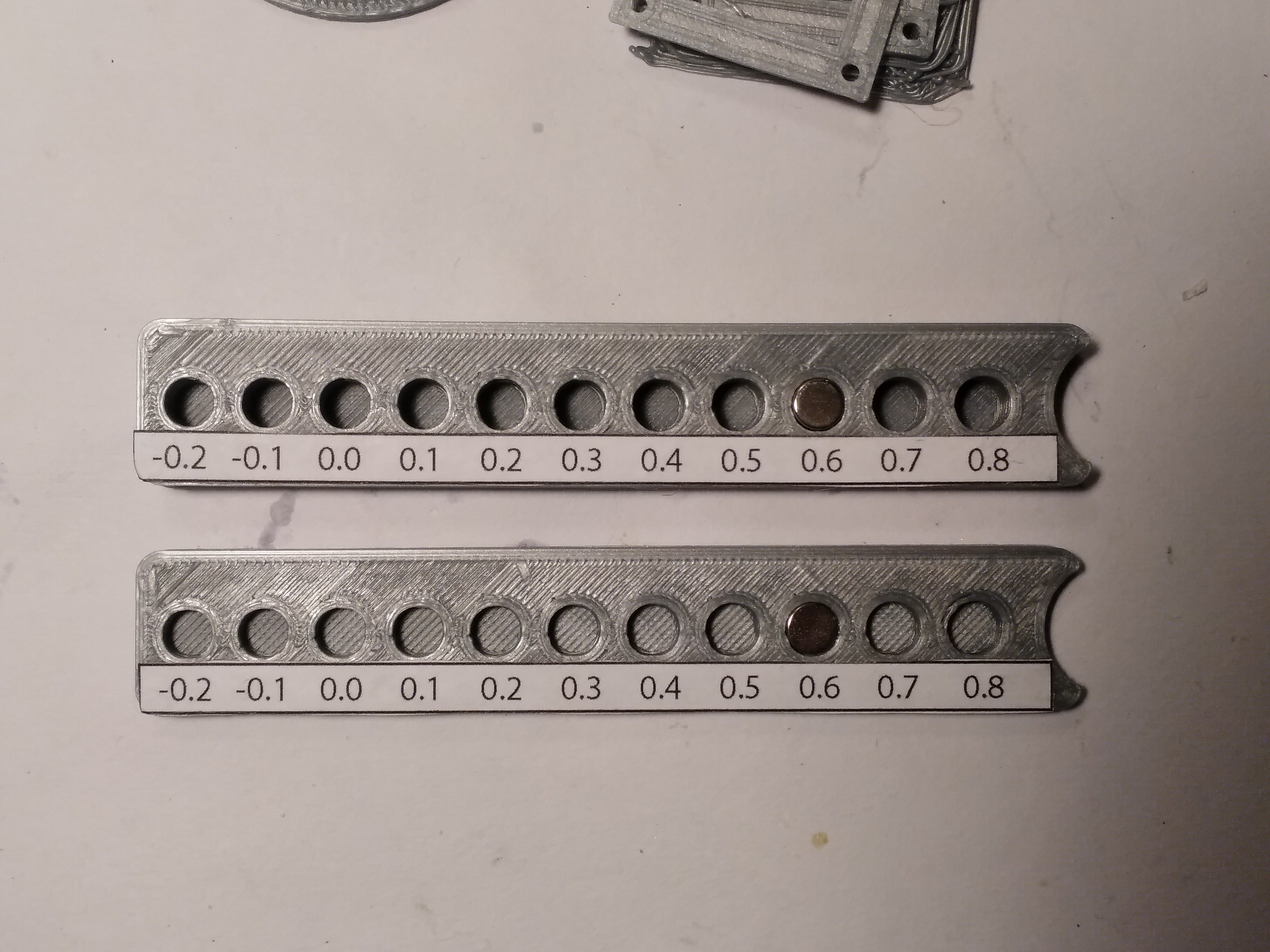
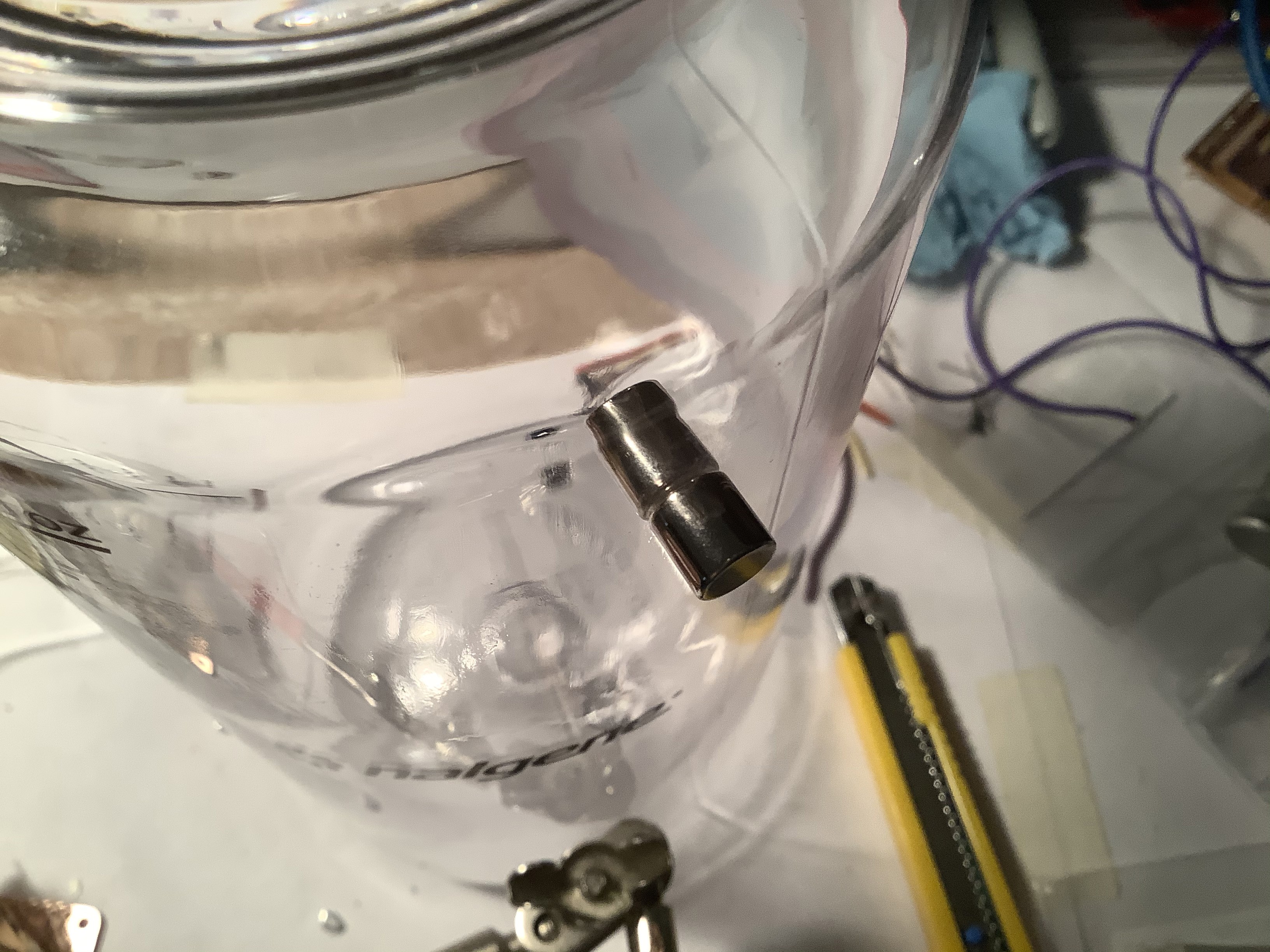
Here is a simple magnet test on the outside and inside of the enclosure.
There will be at least 2 external pieces that clamp on to the enclosure. The external clamps will have a handle, and this is where the rope from the spool will be attached. Also may consider attaching a GoPro to this, for verification of testing experiment #1.

Prototyping the external clamps involved many iterations and adjustments. The PLA and polycarbonate interface had low friction. Electrical tape somewhat worked but un-adhered. The purple duck tape looks promising until cutting some rubber gaskets for it.

Ready for the next embarrassing mistake? The servo block does not fit. It needs a redesign and another few iterations. Considering changing from 3 dowels to 4.
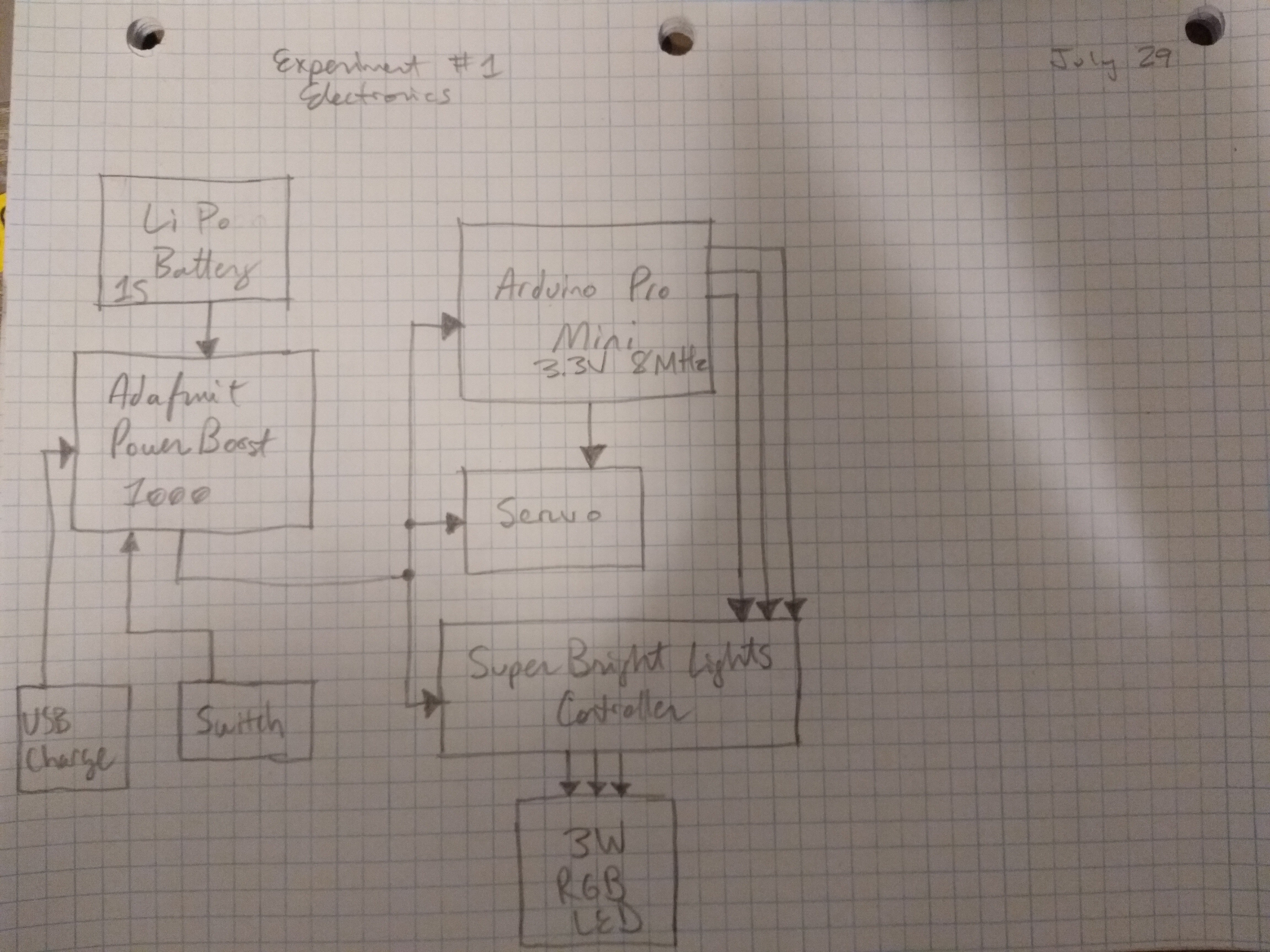
Here's what the electronics will be for experiment #1. (This is what have on-hand, and different from what Leo and Tobi are working on)
More progress to follow.
Spool Box Modelling
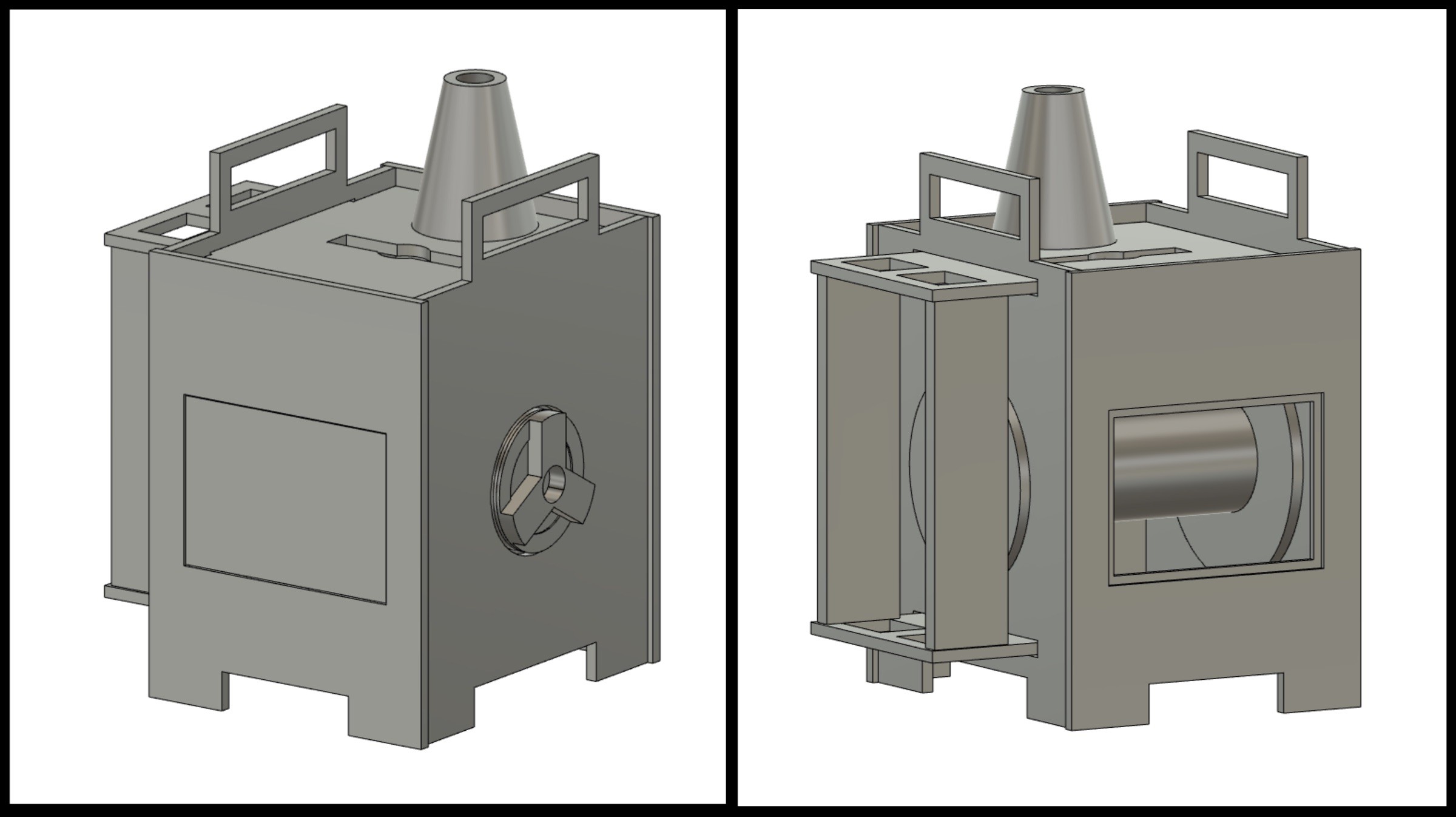
The spool box is what will house the rope, and the intelligent buoy will be resting on it until timed release. The sides of the spool box have areas for rope to be tied to, which attaches to the gear. There are handles at the top for the fisher to retrieve it. It will use HDPE, which resists biofouling. HDPE is buoyant, so the assembly might need some steel plates on the bottom for ballast. The tapered cone at the top is to guide the rope when unspooling. The box design was inspired by the Othermill / Bantam Tools mill.
The spool box will be able to sit on a device that will help automatically re-spool it. There's a key interface on the right hand side. Not wanting to introduce bearings to water, especially salt water, I wanted to see if two concentric rings of HDPE would be able to work. Later learned that these are called sleeve bearings, and it seems like HDPE is a good material for it. For automatic re-spooling, I was researching how fishing lines are re-spooled, as well as sewing machine bobbins for inspiration for this. This is what brainstorming looks like for me along the learning journey:
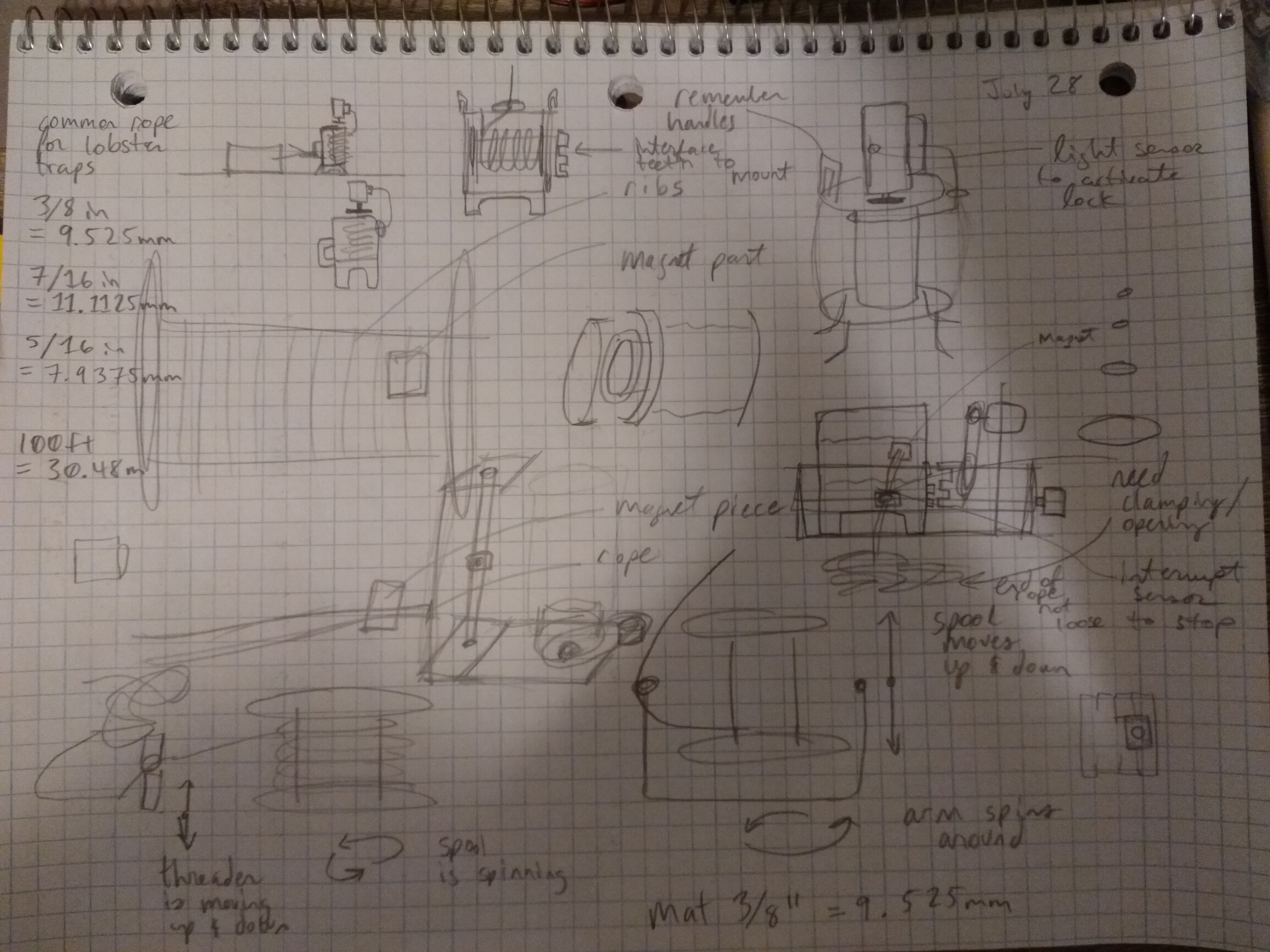
Here's the concept of the automatic spooler. What, you don't understand it? (jokingly)
Update on EVERYTHING Else
Random: There are a variety of things that come up that need some research and exploration to understand it better. This week so far, I've also learned about:
- Sleeve bearings
- The material HDPE
- Seals
- Pressure under water
- Evaluating curvature of nalgene bottle without cutting it
- Some rules for deploying ropeless systems for testing in the ocean in Canada
I still have more to learn about seals, and have heard that there's a handbook for o-rings sizes.
Teamwork: Team wise, I made a mistake about when organizing a Doodle for a meeting of not including all of the hours (the ones I wasn't available in). Everyone is bound to miss a meeting at some point. Adding all the hours would have saved some confusion. Will do better next time!
Meetings: Much of the contacts initiated in week 3 am finally having discussions with. It's been inspiring to hear how much people working in the same area want to help each other out with knowledge.
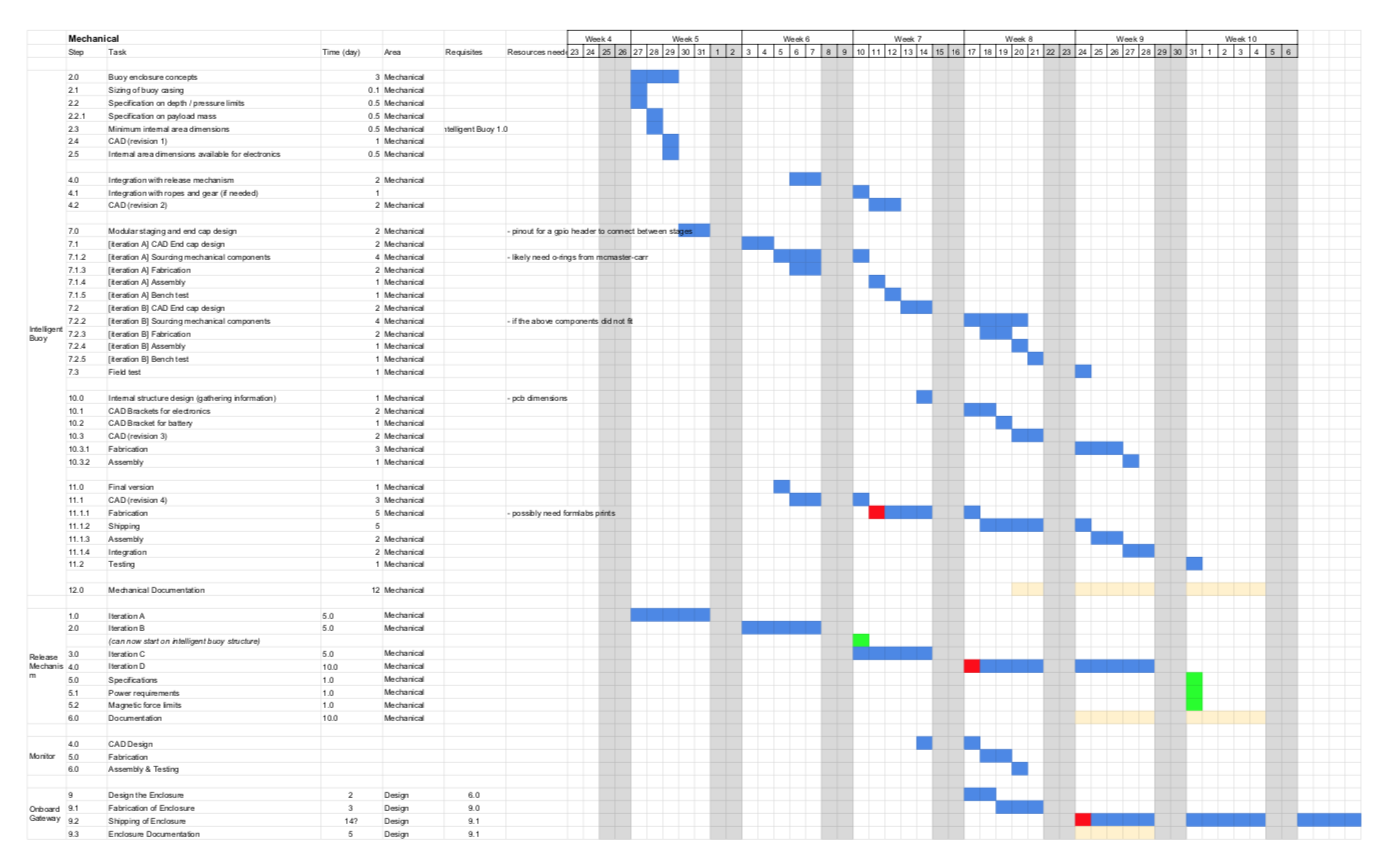
Gantt chart: Week 4 was figuring out timelines and making a Gantt chart. Leo and Tobi and I added each of our area's tasks to the list. Below shows the tasks and timeline of mechanical. Right now I'm in the process of experiment #1. The red boxes mean deadlines for sending files for fabrication — aiming to push earlier on these if all goes well.
Parts list: Parts list getting there, and will likely order some materials and fabrication items tomorrow (today). Might need to delay a McMaster-Carr order for the o-rings til Monday, however this will give me some dedicated time to dive in to the o-ring sizing.
Test spots: What do you think about these two local spots and conditions for possible early testing? 😉

Ok, maybe calmer waters to start with first.
Next step: The next step is to iterate on the prototyping above and run experiment #1. Future updates will be shorter but more frequent. Shifting to logging what has been done every day for 15 minutes, and posting every couple of days.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.