 EK
EKAfter Test #01, there were simple changes to be made that would let us gather more information with this version. For example, really wanted to see the wiper move under water.
Objectives of the test
- Verify the external wiper attaches to the internal wiper while in the water
- Verify the external wiper moves with the internal wiper while in the water
- Observe if the changes made from yesterday improved
- Observe what else does not work in this version
- Compare the results with the conditions from Test #01 (wave height ~2 cm) to Test #02 (wave height ~15 cm)
Read on for the changes made and test results!
Here were the fixes made to the board. For the servo traces, used some resistor leads to extend from the servo header to the traces that were not broken. Also added hot glue.
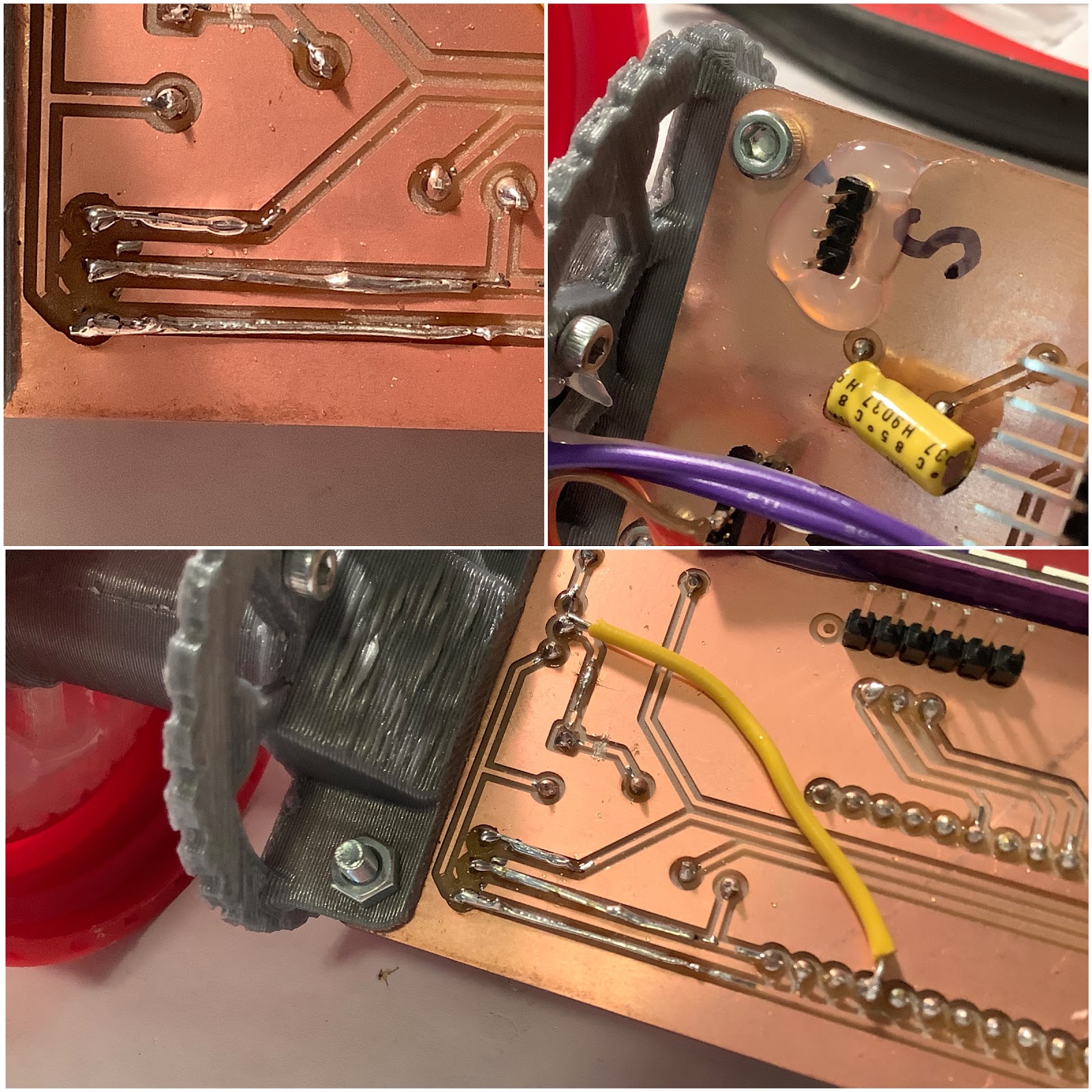
Here was the complete list of fixes:

The good news is that on setup, everything was functional except for the Neopixels. The important part is that the wiper is moving!

The first error that occurred was when the lid cap separated from the enclosure.

The trouble with getting it to sink to the floor still existed, it was even more-so with the faster current yesterday.

Here is a look at seeing the internal wiper moving:
The external wiper regularly disconnected because the internal wiper was moving across the LiPo battery. This distance was too much for the field of the magnets to reach the external magnets. It was interesting to see some sand near the magnets.
The organic matter suspended in the water was moving around faster today:
Here’s what it looks like when launching the buoy into the water with a pendulum throw:

And from the buoy cam:
Here is the internal wiper still moving at the conclusion of the test:
Here are the learning lessons from this test:
What worked
- Servo motor was moving
- New end cap design worked
- Two bags: wet & dry
What didn’t work
- Trying to get the buoy to stay underwater, especially in this faster current water with taller waves
- Neopixels didn’t light up
- External magnet wiper kept falling off and becoming lost (it was retrieved though)
What needs to change for future version
- Need a better homing sequence of the servo
- Battery gets in the way
- Need a string on the magnet piece to make sure it doesn’t go far away if disconnected (eventually make this a captured piece design)
- Better attachment for lid cap piece
- Record temperature, humidity, wind speed and approximate wave height for each test
These learnings were particularly useful for thinking about a version 2 design for testing. Additionally, the parts from the DesignLab were received yesterday (more on this later! Thanks @Giovanni !). This means we could test fastening the buoy to the spool box top plate, and also have better weights attached to the top plate.
As for the weights, there are multiple ideas. One could use weights, rocks, sand, water. For the water idea, the use of recycled bottles filled with water, attached to each of the end caps, could be a solution.
One of the key problems to solve will be getting the servo wiper positioned properly. When fastening, all the original positions are scrambled. Therefore, positioning will need to be adjusted dynamically. This could mean attaching limit switches to the sides of the battery which would be pressed when the wiper moves near it.
Guiding version 2 is the goal of being able to see and test the external wiper working in water.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.