In my recent holyday in Denmark I had the opportunity to test the GPS module in a car. The last short test in a car produced a interesting behavior when we drove > 100 km/h. The module lost the fix and did not recover until vcar < 100 km/h. I assumed that this was because I chose the navigation setting 'pedestrian' because back then it was mainly used for hicking.
So with the setting changed to 'automotive' I gave it another test... and it worked flawlessly. The module never lost the fix for sppeds up to vcar = 130 km/h (Thats the speed limit on Danish highways). I even squeezed another 2 h of run time out of the same 18650 battery I used during my first tests. The total runtime now adds up to about 29.5 h!
To compare the position accuracy I recorded the track on the one hand with my trusty HTC One paired via bluetooth to the module and with my Xiaomi Mi Mix 2 (GNSS). The module as well as the mobile phone where positioned under the front window on the co-drivers side.

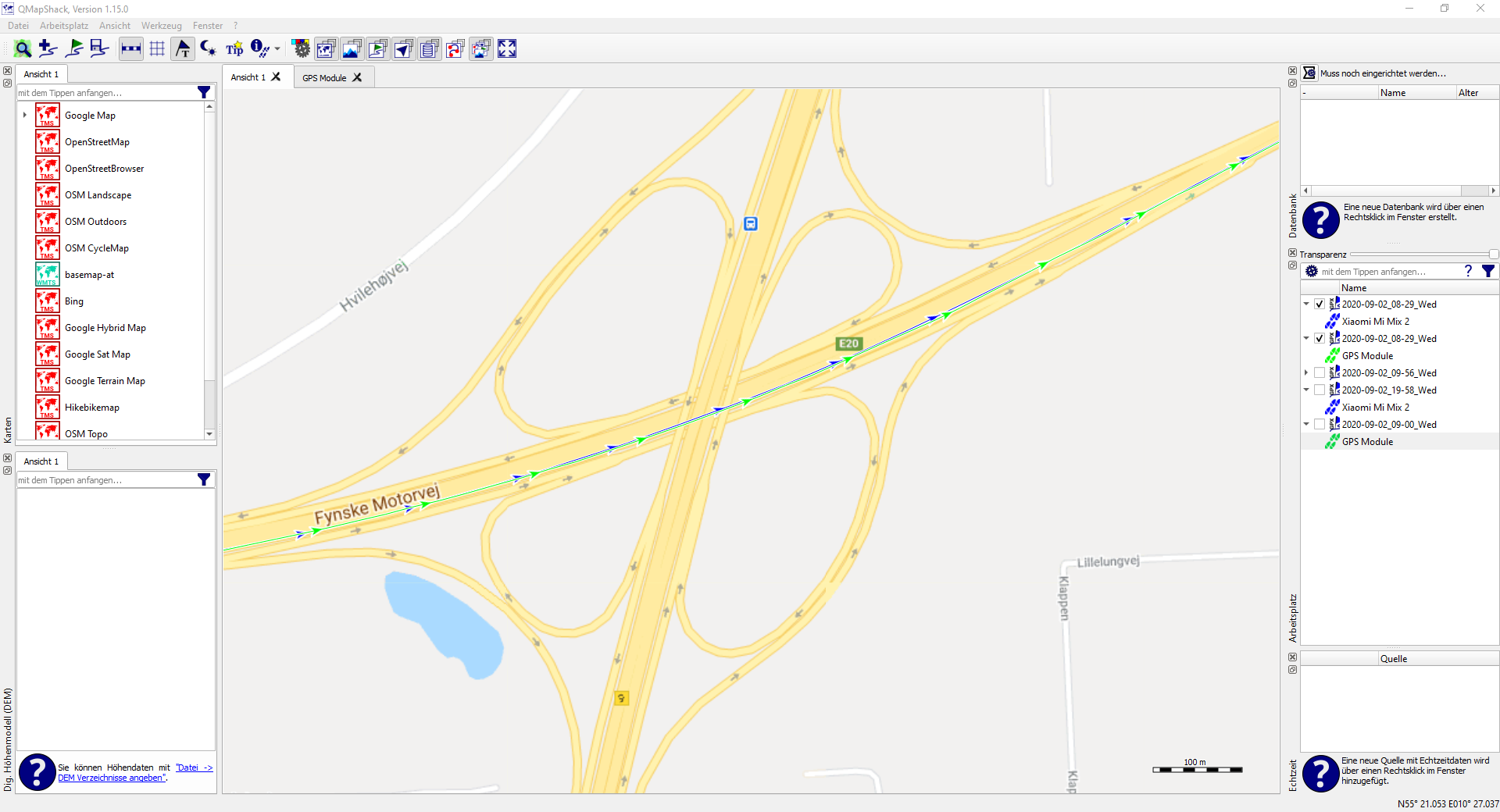
Comparing the tracks on the highway one sees virtually no difference (Xiaomi Mi Mix 2 in blue, GPS module in lime green). Both tracks almost superimpose along the ~54 km I recored.
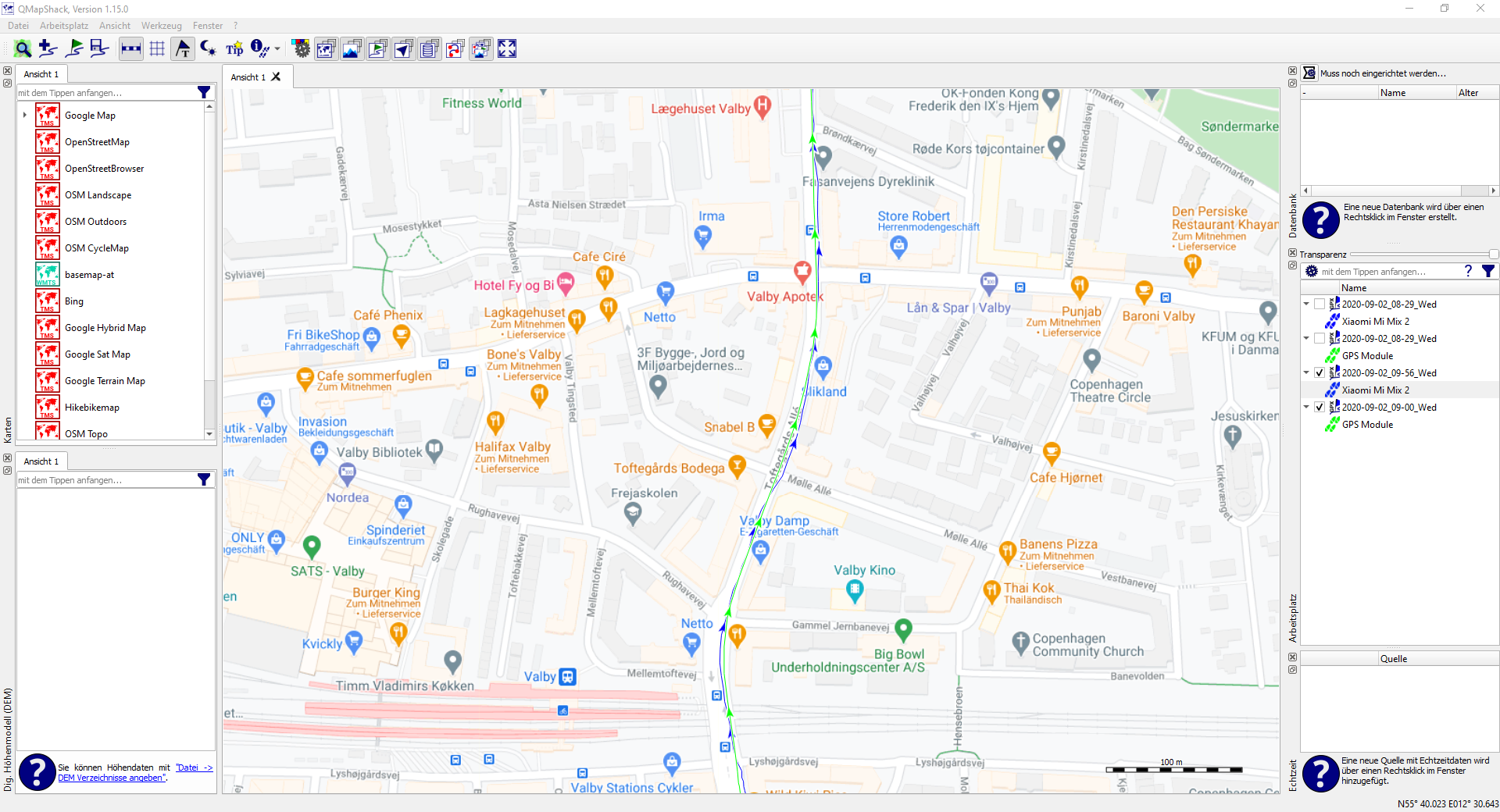
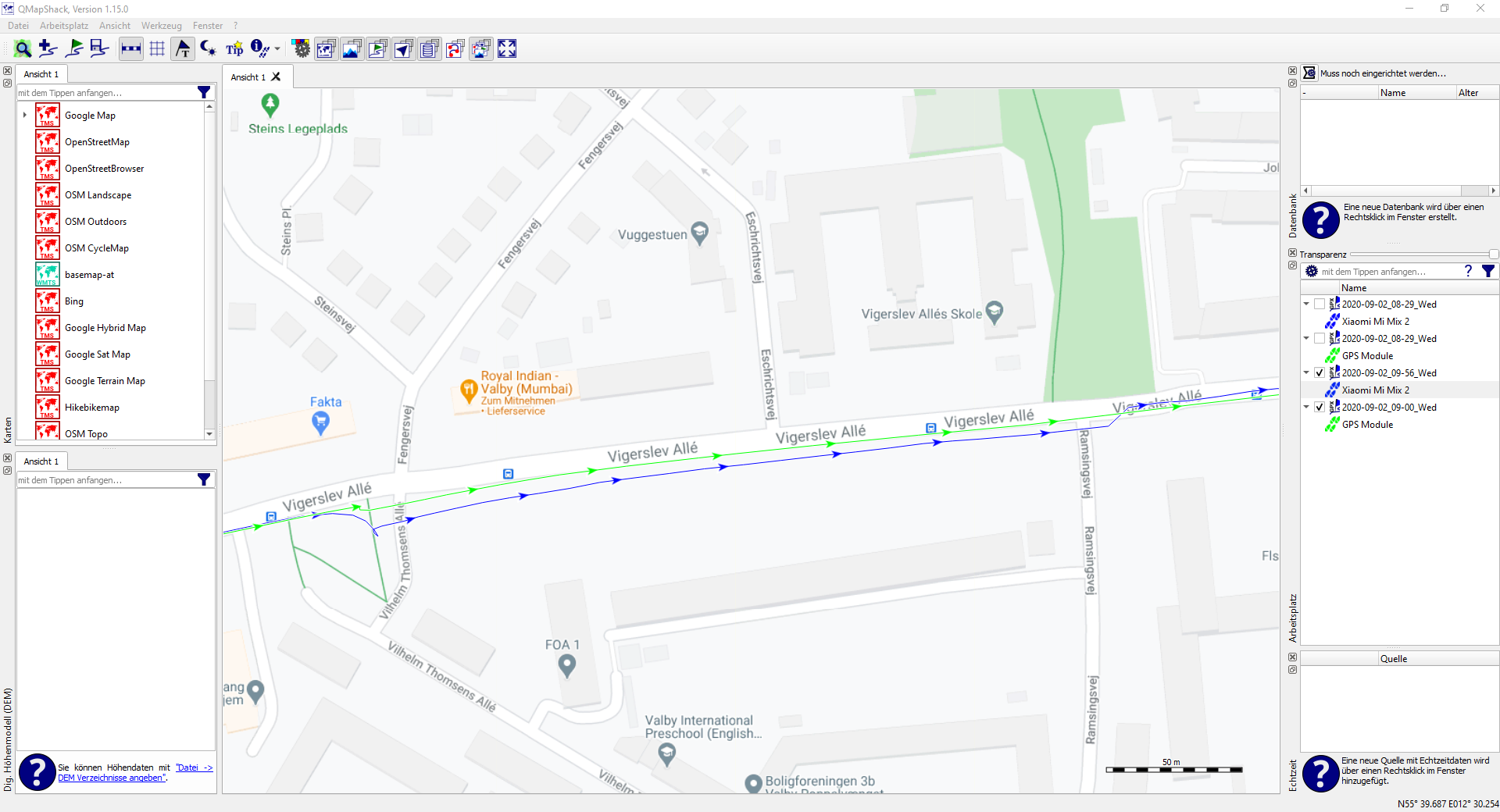
In the city on the differences are a bit more clear. Whereas the generell position from the mobile phone in the city is good, the module is better :) The track from the module seems to be following the street on the right side of the road more often, the mobile phone drifts all over the street (but still on the street though!)
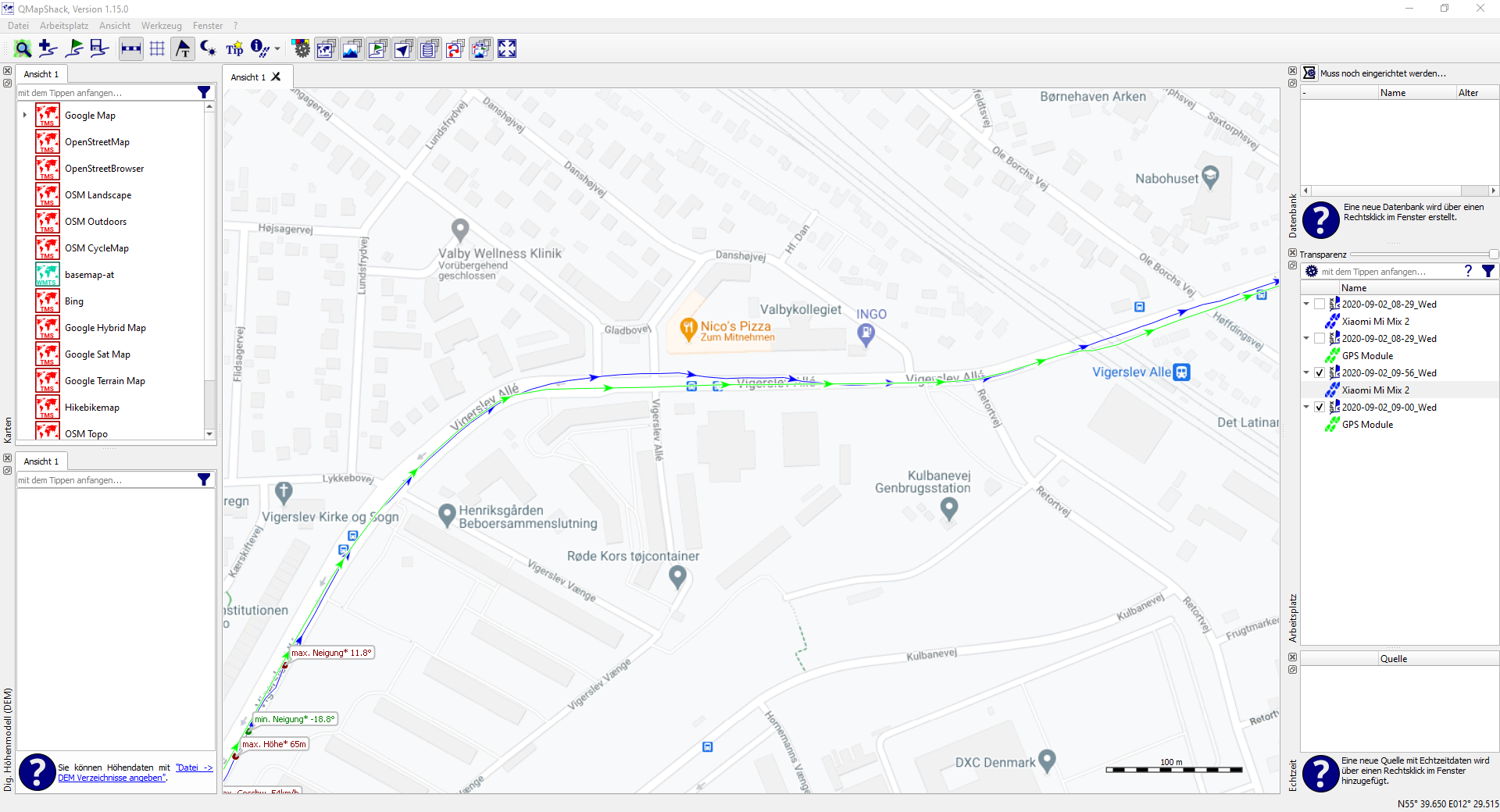
In challenging situations where the GPS signal was weak or reflections disturb the correct positioning the module seems to drift less and recover faster. I assume this is because of the substantially larger antenna, so not a very fair comparison.
I put the GPX tracks of the highway and city test for both devices in the download section for everyone to compare.
All in all I am still very pleased with the device I build. The u-blox NEO M8N preformces awesome and this is without complex implementations and shilding.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.