 David Tucker
David TuckerIt has been a long slow process, but I finally got my belt drive prototype finished. Modeling the gear was the tricky part, it took several tries and a lot of reading to finally work out how to make it fit the belt perfectly. I will try to do a writeup on that soon.
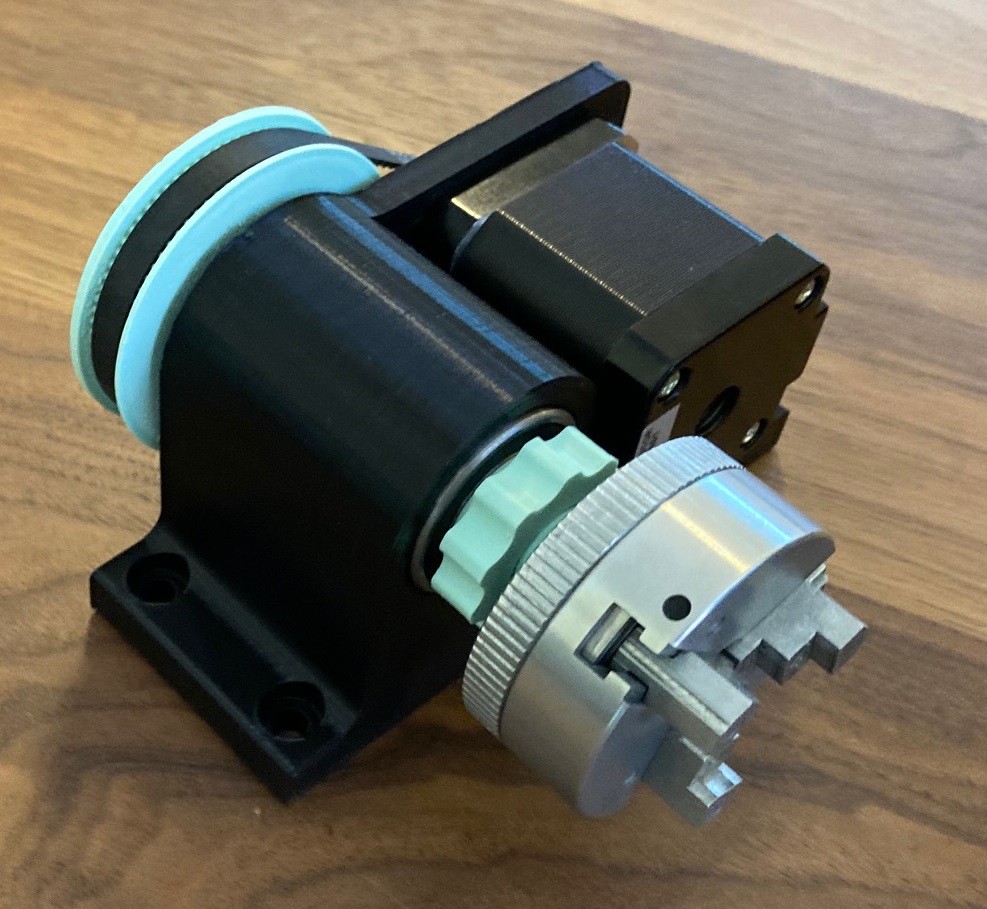
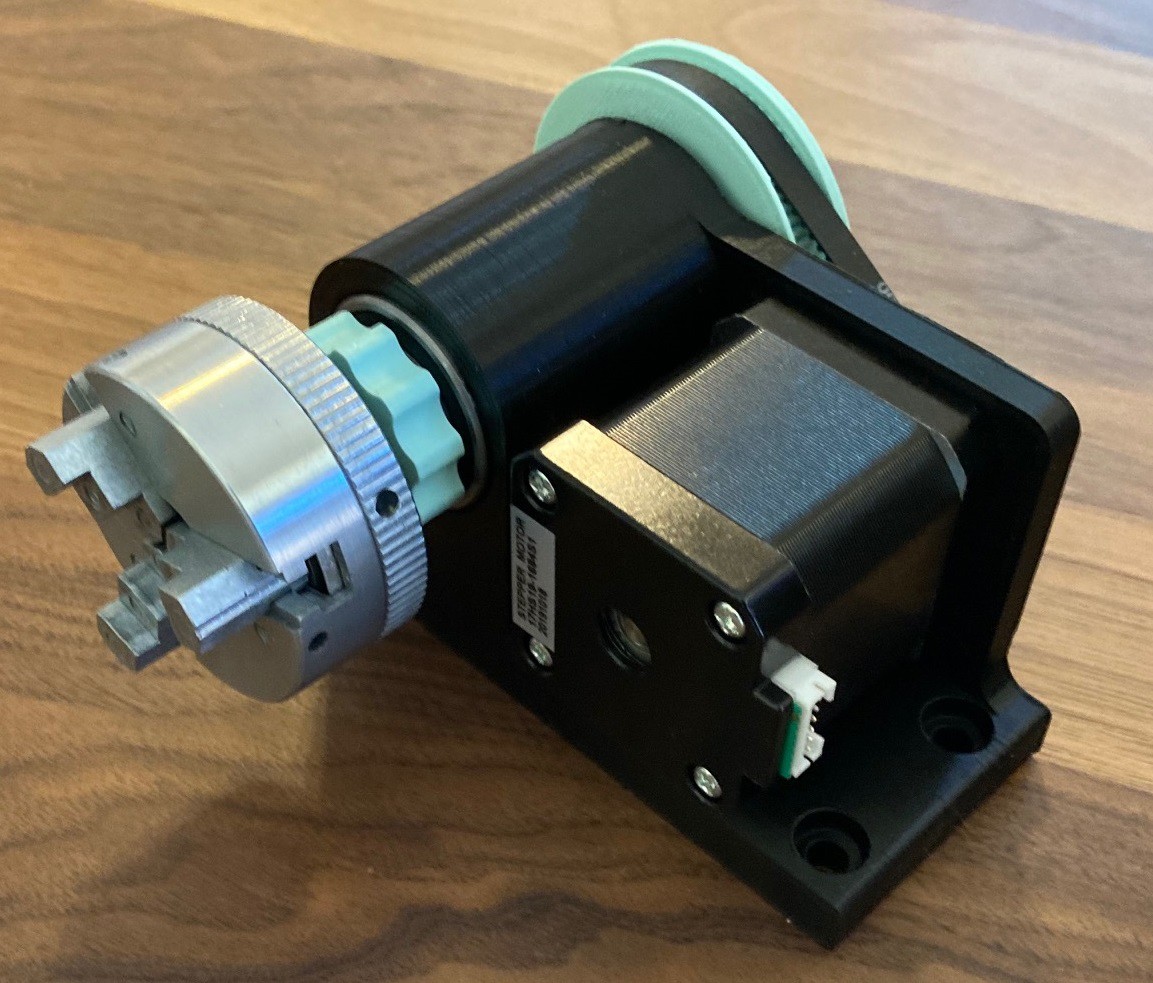
I'm still using an off the shelf 3 jaw chuck. My long term goal is to get rid of that and make a few different 3D printed chucks. That should save a bit of cost, and allow me to use a slightly larger chuck, as well as supporting different mounting styles such as a pen vice.
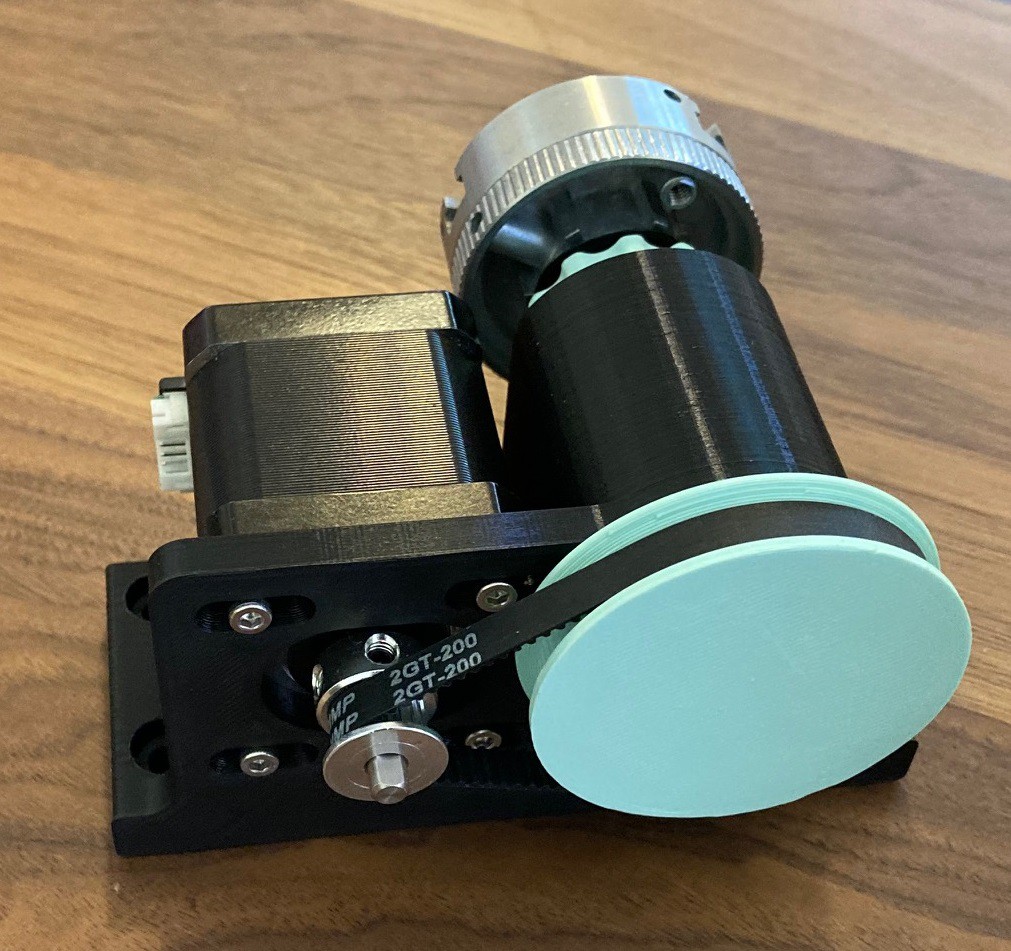
I'm also still using my smaller 20 tooth metal gear. I will try to do a writeup on how to design it in plastic so that you don't need to purchase that gear to build this.
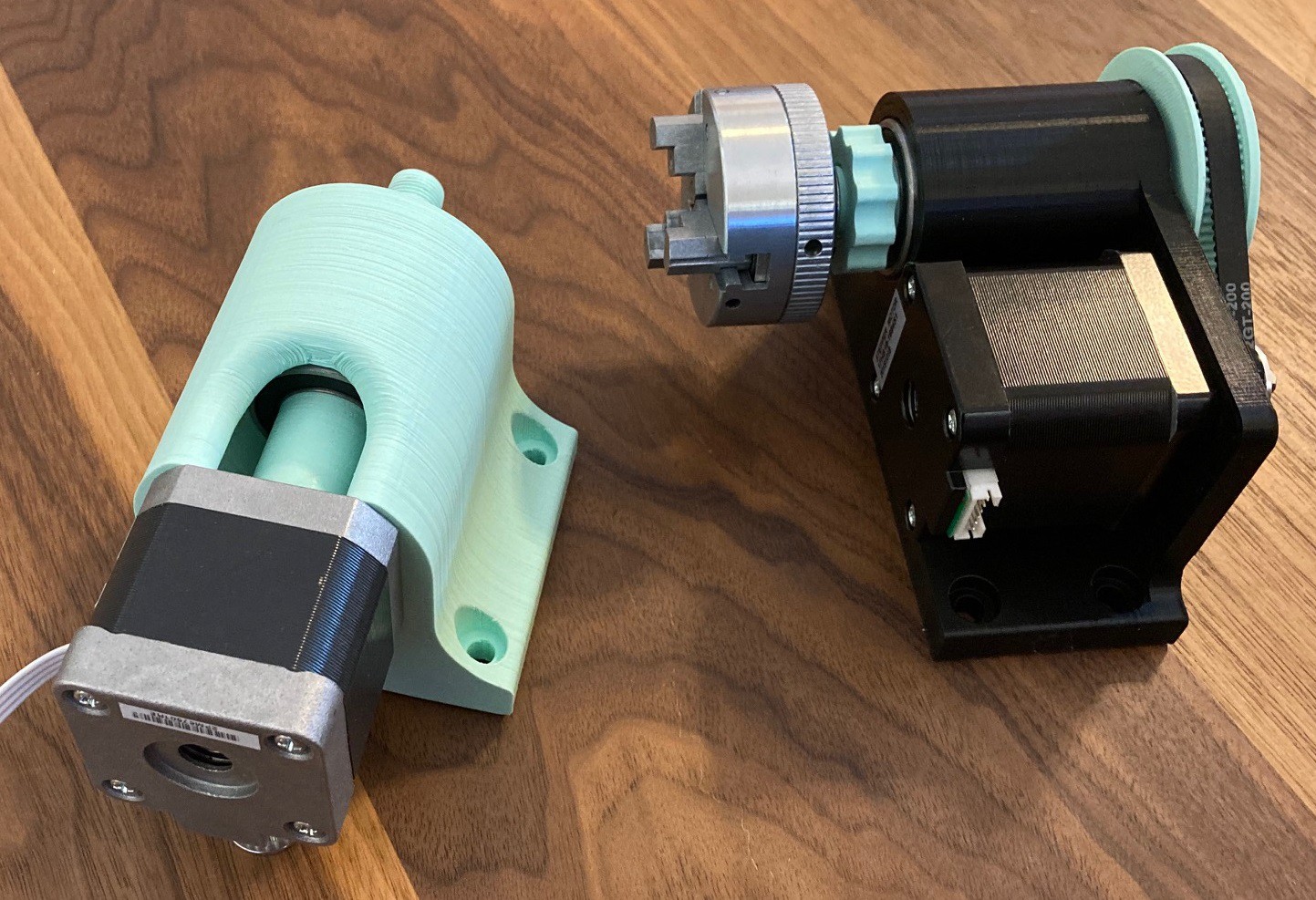
I still need to do some testing but this feels a bit more sturdy than my direct drive prototype. However the direct drive version is simpler to print and cost less so if we don't need the extra resolution or strength of the belt drive then that will be the winner.
Once I have a chance to test both of these out I will try and put this all together on thingiverse for everyone to play with. There are still a lot of details to take care of. Not only do I need to mount this, and learn how to drive it, I need to work out some way to swap between the X axis and this new A axis. I have an idea for upgrading my controller to either a RAMPS based board or a more modern 32 bit board running Grbl Mega or Grbl Hal.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.