 David Tucker
David TuckerI have been contemplating a rotary attachment for a while now but got hung up on the design. In order to shake off my paralysis by analysis I have decided to just print up a few different designs without worrying about them being perfect.
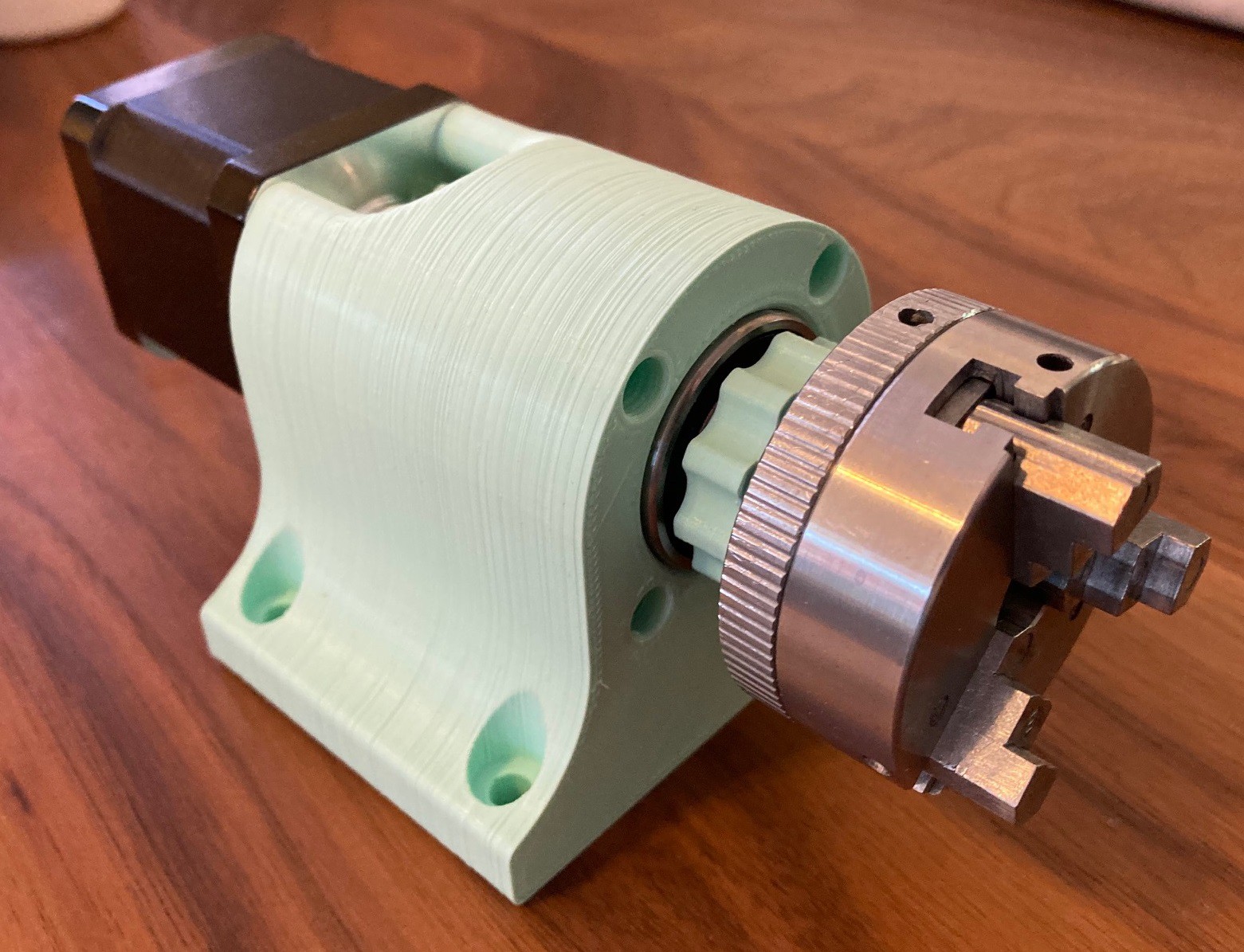
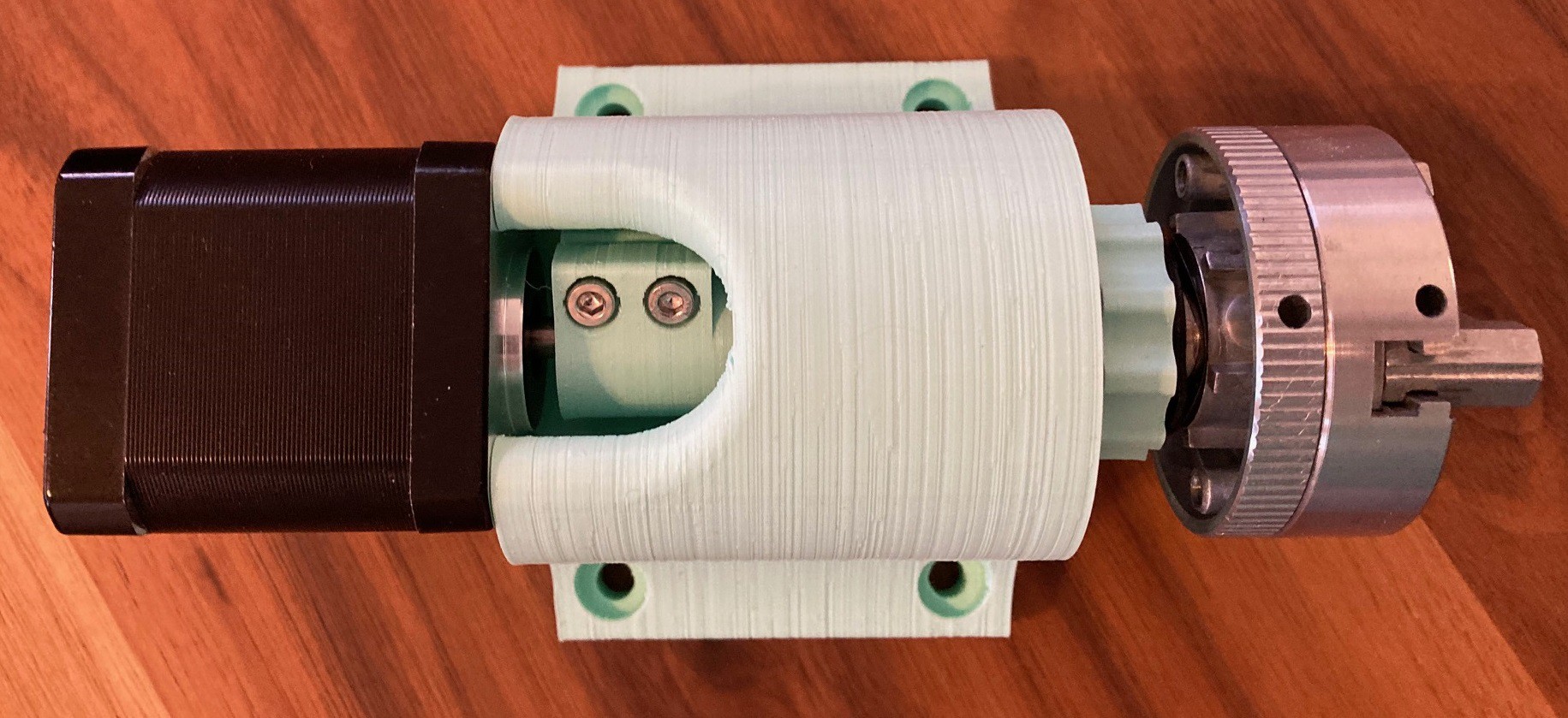
My first design is a direct drive setup with no gearing involved. I'm using a pair of bearings with a 15mm inner diameter and running a 3D printed rod through the middle of the bearings and using a nut to clamp it all into place. The chuck is then threaded onto the rod using its built in M12x1 threading. This is less than ideal but it will do for now.
I'm using an off the shelf Nema 17 motor that I had left over from my multibot build and the chuck is a little cheap unit I got off amazon for $13.
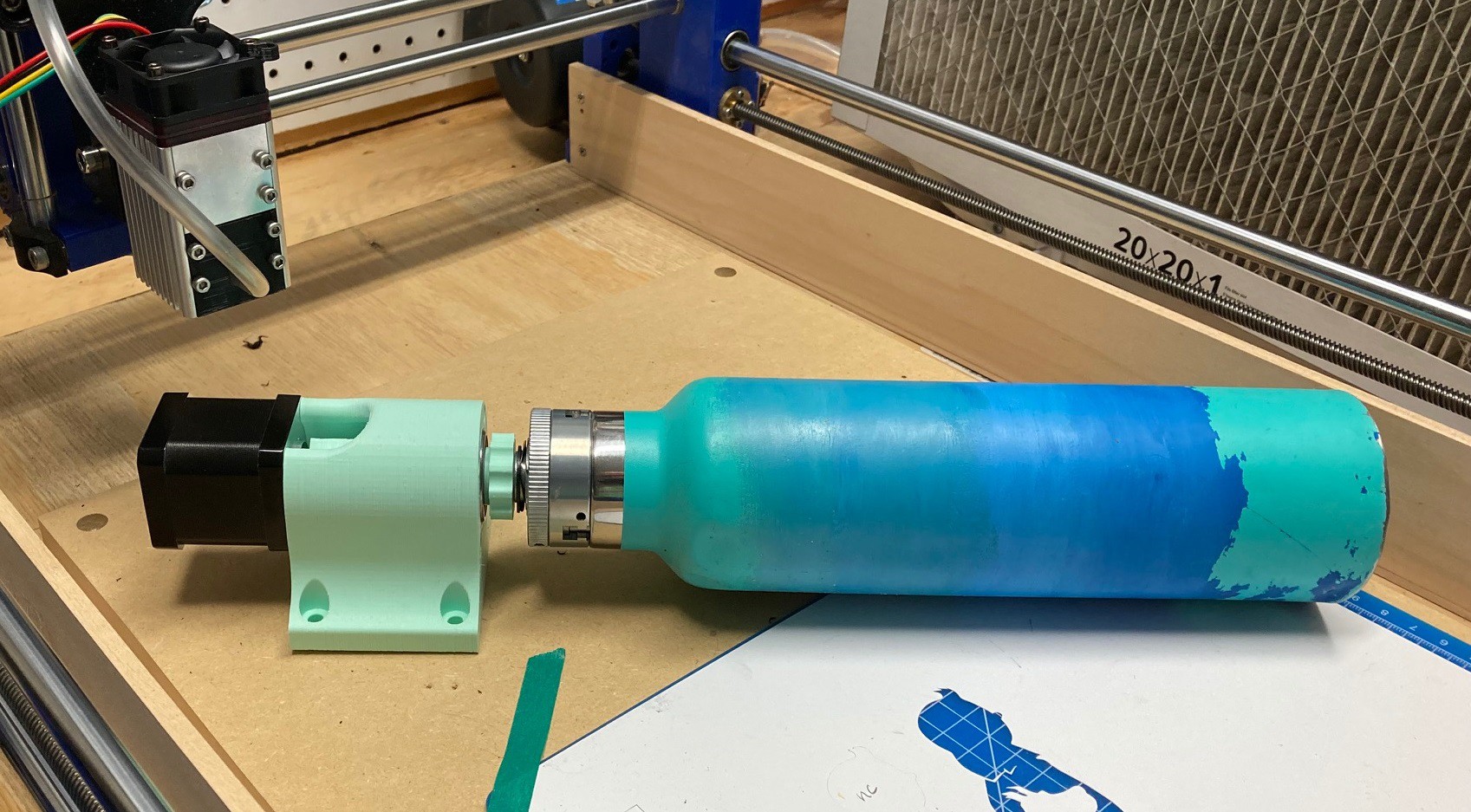
With my 90 mm of clearance I can just barely fit the smaller hydro flask on the chuck with enough clearance for the laser to focus.. It would need some sort of a tail stock to make this work but it should be possible to customize water bottles with this setup.
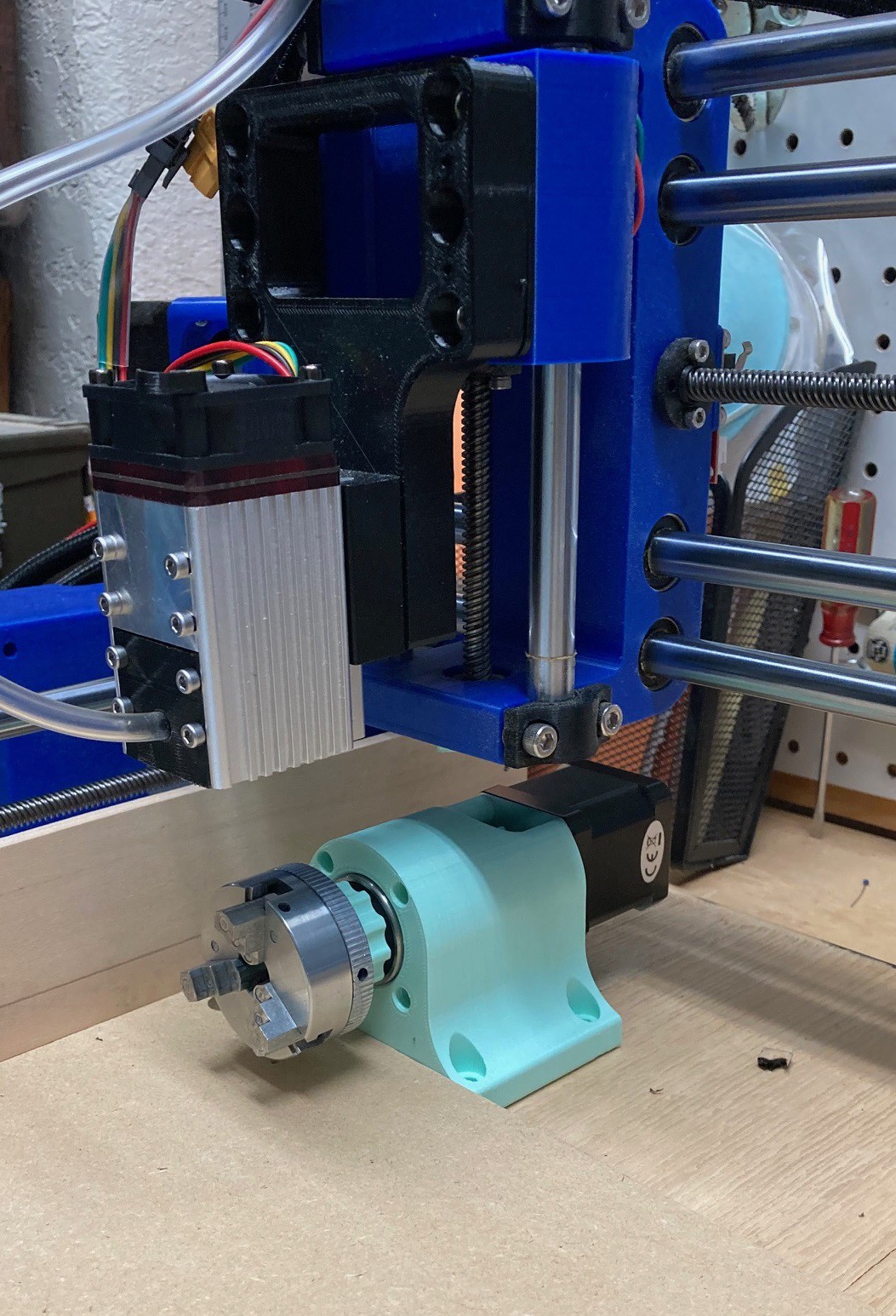
I'm thinking of mounting this permanently on the back side of my machine, just past the waste board. For larger items I could remove the waste board to get a bit more vertical clearance and for smaller items it would be always ready to go without interfering much with the normal operations of the machine.
There is a lot more resistance to turning this than I thought there would be. It is possible that I could clean the bearings and re-grease them (somehow) to get it to spin more freely. However it is probably best to go with a gear or belt reduction to get more power out of the motor. To that end I have ordered several toothed belts and some metal pullies to experiment with. Although ultimately I would like to dump all the metal parts and make this fully 3D printed except for the bearings and fasteners.
I need to work out a low cost way to add a tailstock that is flexible and does not eat up a lot of working height. I also need to work out the best way to switch the y stepper motor out with the new rotary motor. I probably will apply power to the y stepper when not in use to lock it into place. Alternatively I could physically block the axis, or I could make a separate stepper driver to run either axis and come up with a way to drive it from the computer. Ideally I would have a controller that could drive 5 axis at once, that may be possible by going with the Mega (ramps) style controller and ramps based GRBL build. I need to investigate that some more. With 5 full drivers I could do 4 axis milling, making it possible to make large flat features in round material.
Anyway this is all preliminary work, I have not tested it at all and will probably land on a different solution in the end. But I wanted to make some progress rather than being worried about getting it perfect.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.