 Robin Fröjd
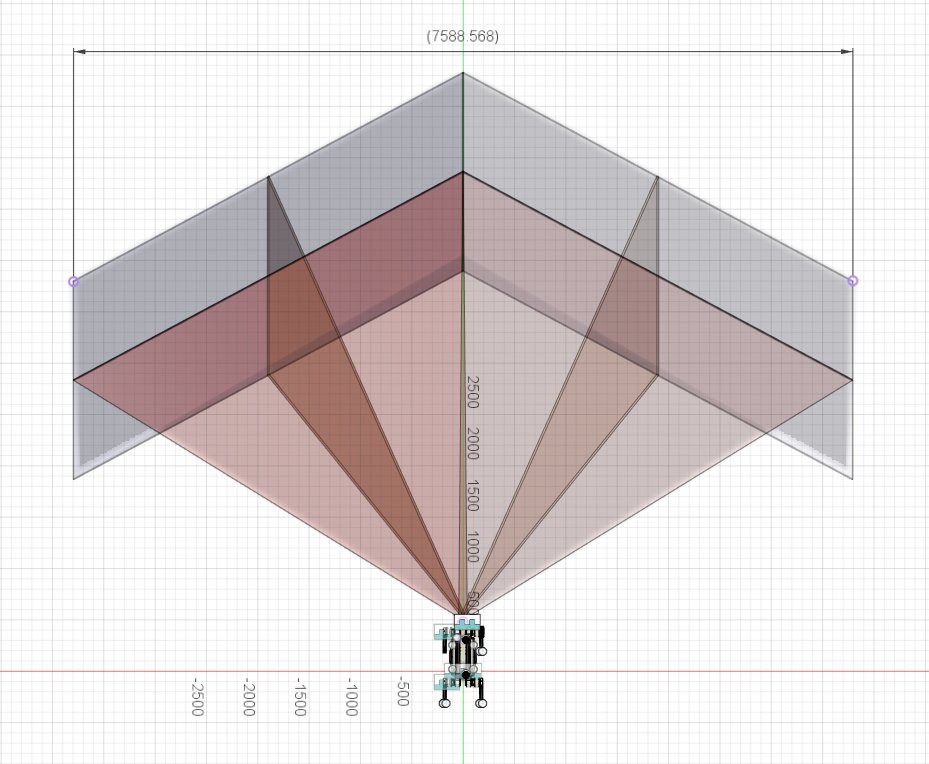
Robin FröjdCalculating the combined FOV for the two #realsense #D455 front cameras at an active range of 4m.
This way I can know that correct placement on the covers before spending to much design time on them. 😇
A project log for K3lso Quadruped
K3lso is a quadruped robot similar to MIT mini cheetah and MIT Cheetah 3.
Calculating the combined FOV for the two #realsense #D455 front cameras at an active range of 4m.
This way I can know that correct placement on the covers before spending to much design time on them. 😇
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.