 Dongjin Kim
Dongjin KimI've been using CR-10 about two years and had replaced the controller board 3 times. The latest board with my CR-10 is SKR 1.3 and it runs with OctoPrint on ODROID-N2 instead of RPi, this is quite enough set up for my purpose since I do not run many plugins and Klipper works gratefully well. Sometimes the bottle-neck issue is sometime discovered but it was not serious and virtual SD card features was not necessary for my set up.
Regardless my usage of my 3D printer, I wondered if ODROID-N2 can operate 3D printer directly without additional montion control board and also found that the Klipper can be compiled its "mcu" firmware for Linux system. So I started to dig into the Klipper code to run on Debian and had changed a bit of code to debug and control GPIO and ADC to run a stepper motor...and it runs.
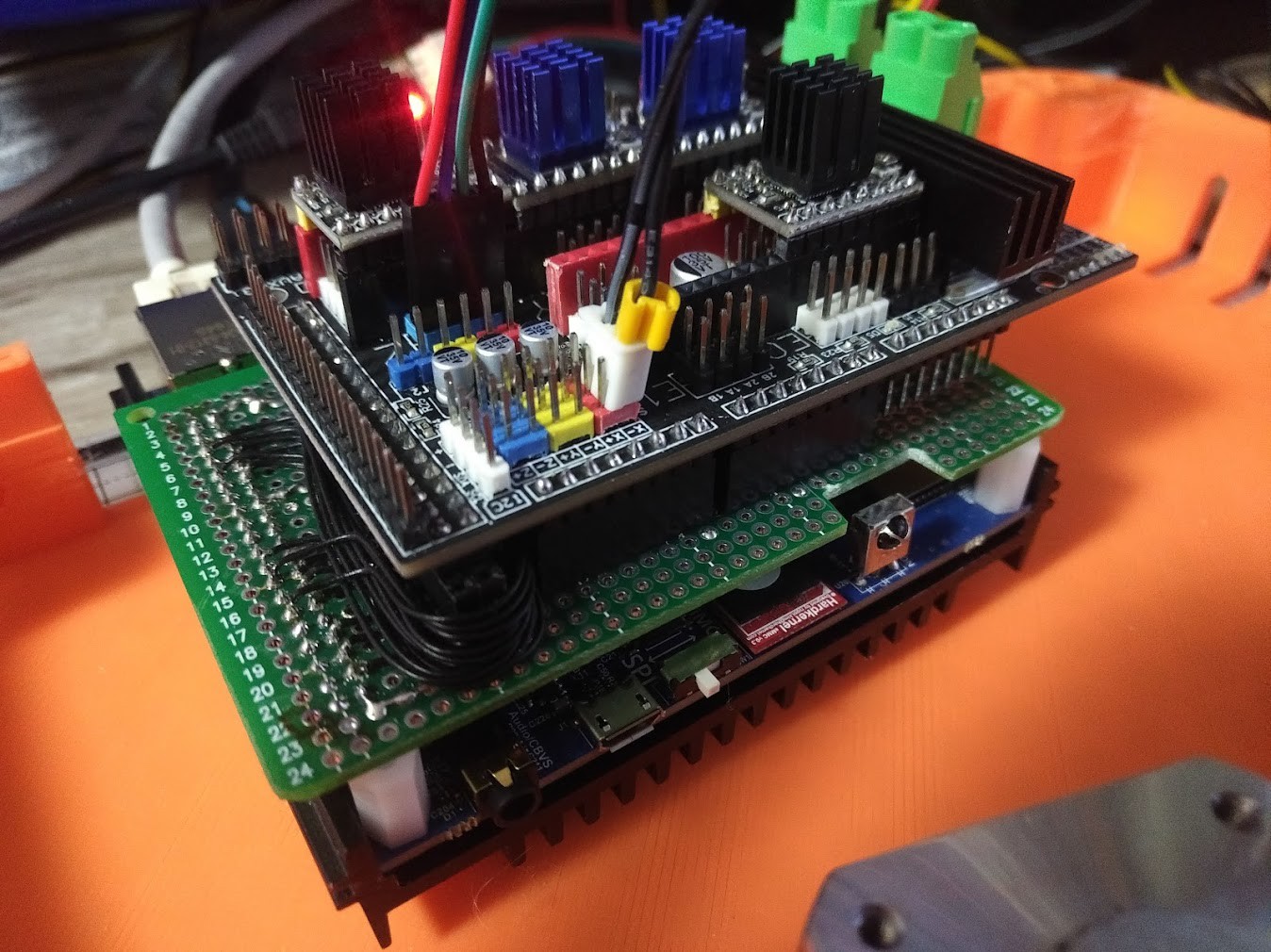
Initially I've tested this with RAMPS 1.6+ with TMC 2130 and TMC 2209, they perfectly work with my another printer End-3 Pro. For this, One bread board has to be in between ODROID-N2 and RAMPS 1.6 in order to connect the signals.
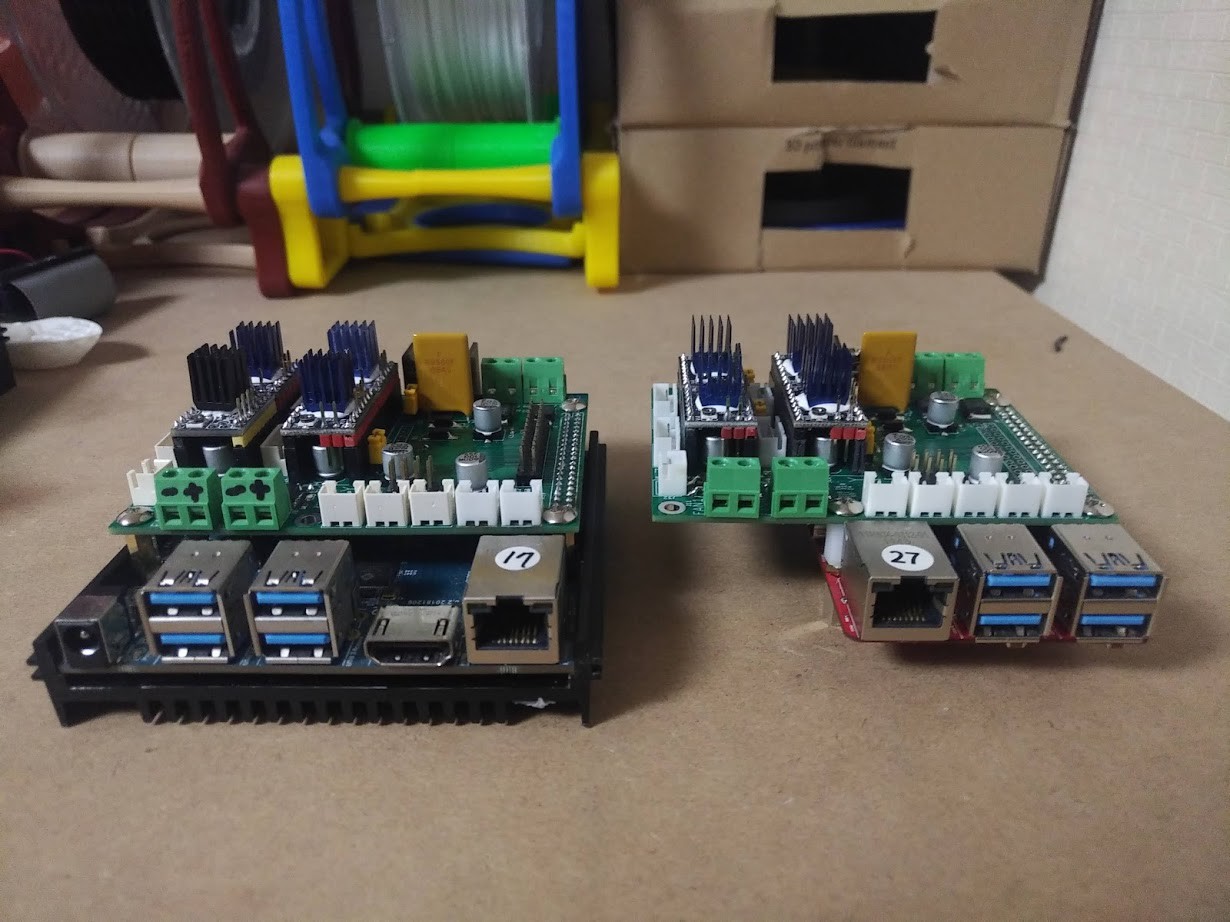
Then later due to the size and its complexity to manage the boards, I've decided to design a PCB that can be mounted to ODROID-N2 directly as well as ODROID-C4. Probably ODROID-N2 with six cores would be a overkill, but trying this SBC first since my goal is to run all necessary softwares on it. Maybe running web server on the same machine could cause a failure or affects the print quality...so I will see...

So board is look like when attached to ODROID-N2 and ODROID-C4.
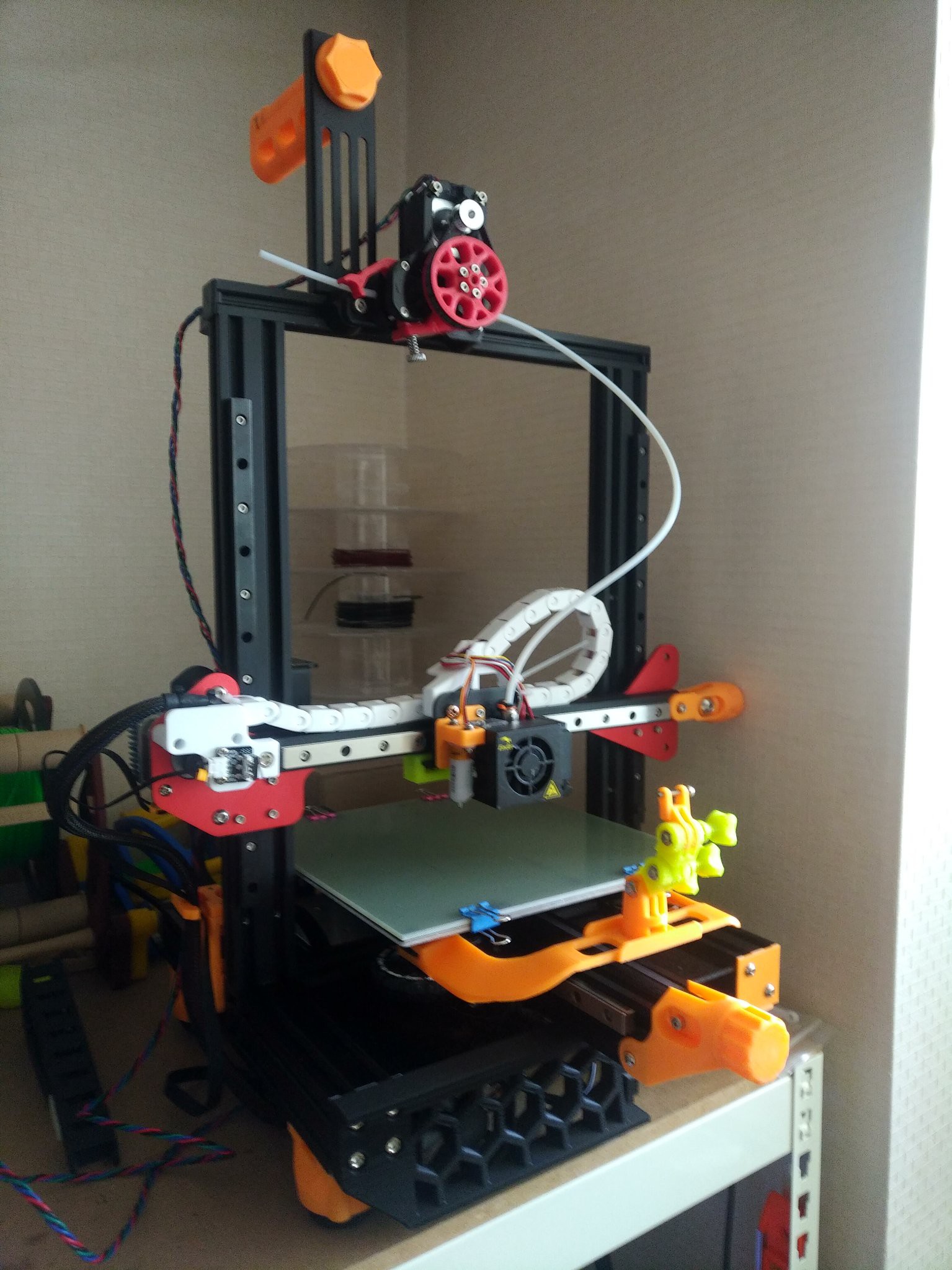
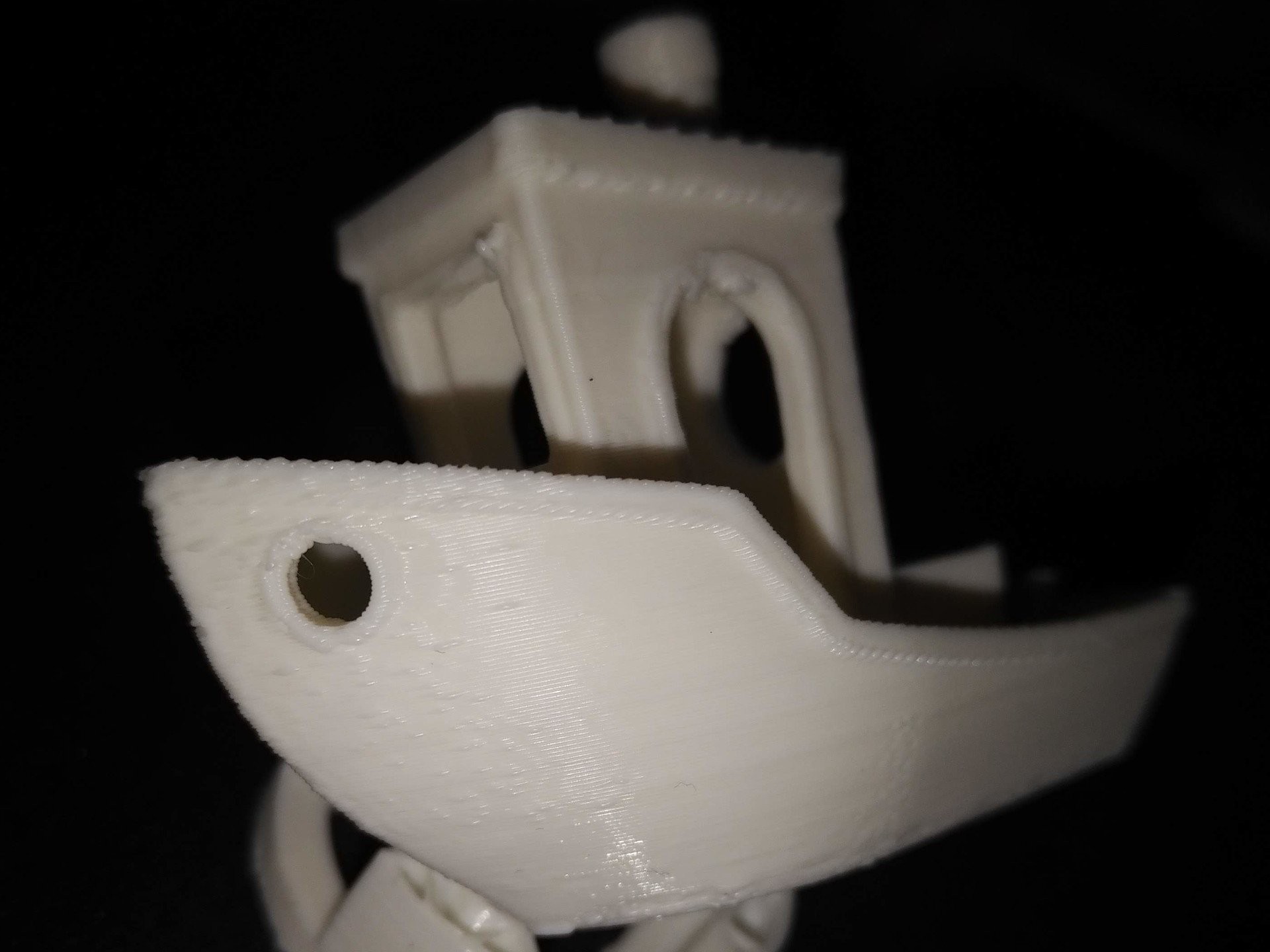
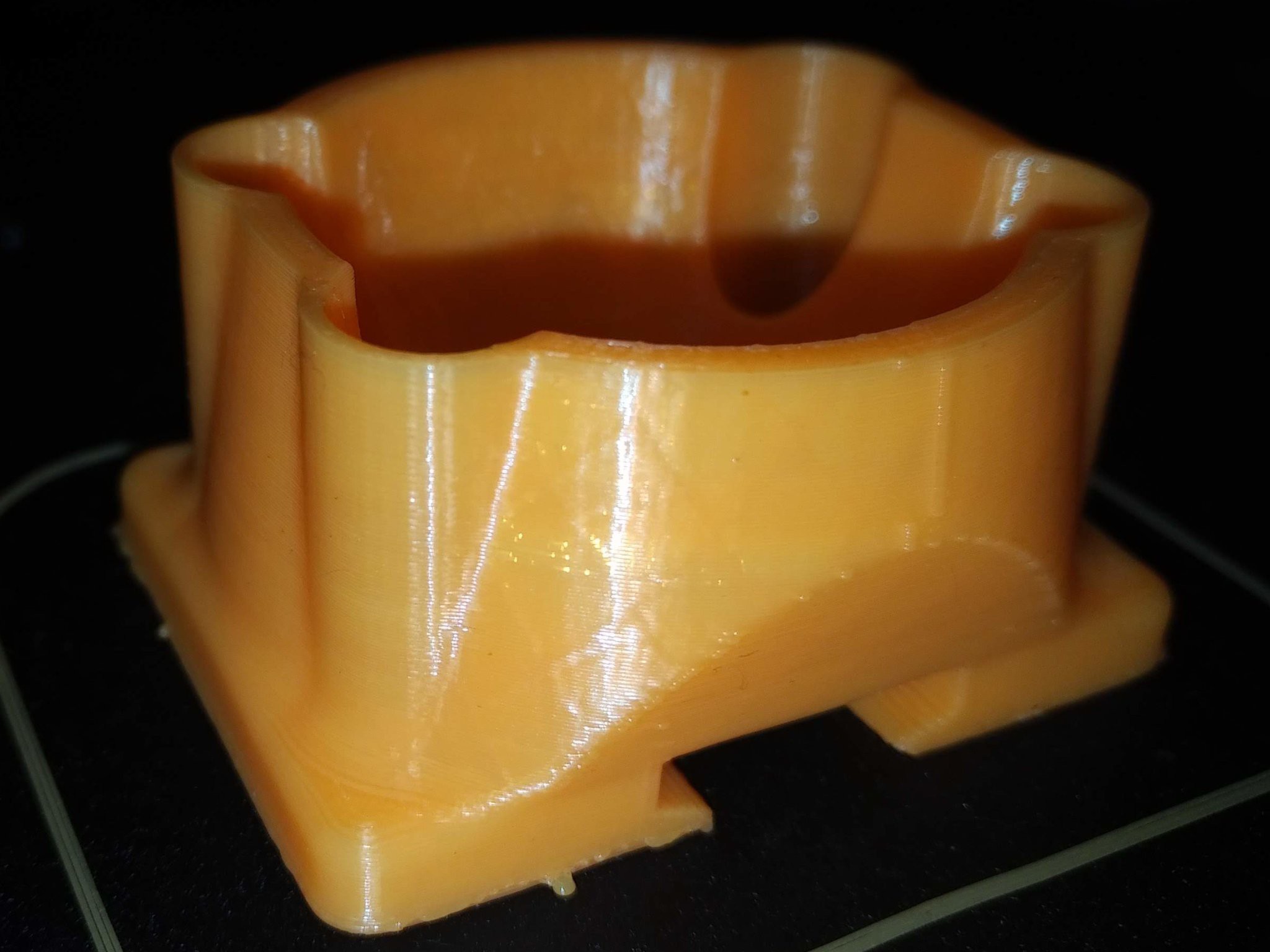
I've not successfully printed with the boards yet since a couple FET I've ordered are not delivered yet. The first print using RAMPS 1.6+ on top of ODROID-N2 was not bad. This is printed with the stock Ender 3 Pro (nothing customized) at 50mm/s with 0.4 nozzle and 0.2 layer. Even it could run faster as much as 100mm/s but quailty was not like this.

This is the video that prints the Benchy.
So...this is my weekend project at home after work...so the progress would be slow but it would be fun. :)


 Andy Piper
Andy Piper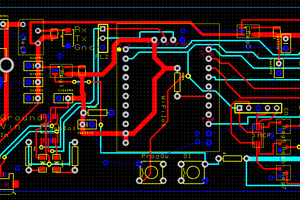
 unfoundbug
unfoundbug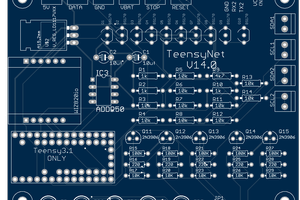
 jimmayhugh
jimmayhugh
 Robert Kirberich
Robert Kirberich
Hi Dongjin, your work to incorporate it with an ODROID is great!
Could you could share the recipe on klipper documentation page following the one from RPi so that I would be happy to collaborate in a month for a Prusa version?
https://www.klipper3d.org/RPi_microcontroller.html