 Yohan Hadji
Yohan HadjiHi there!
The purpose of this project LOG is to give you some news about the project, and explain what's next!
1. Technical development
As stated in the last project LOG, the system is now mechanically functional. It only remains to design, test and validate its automation. In other words, the system need to do the exact same things but alone.
A PCB for the on-board computer has been designed, produced, assembled and tested :
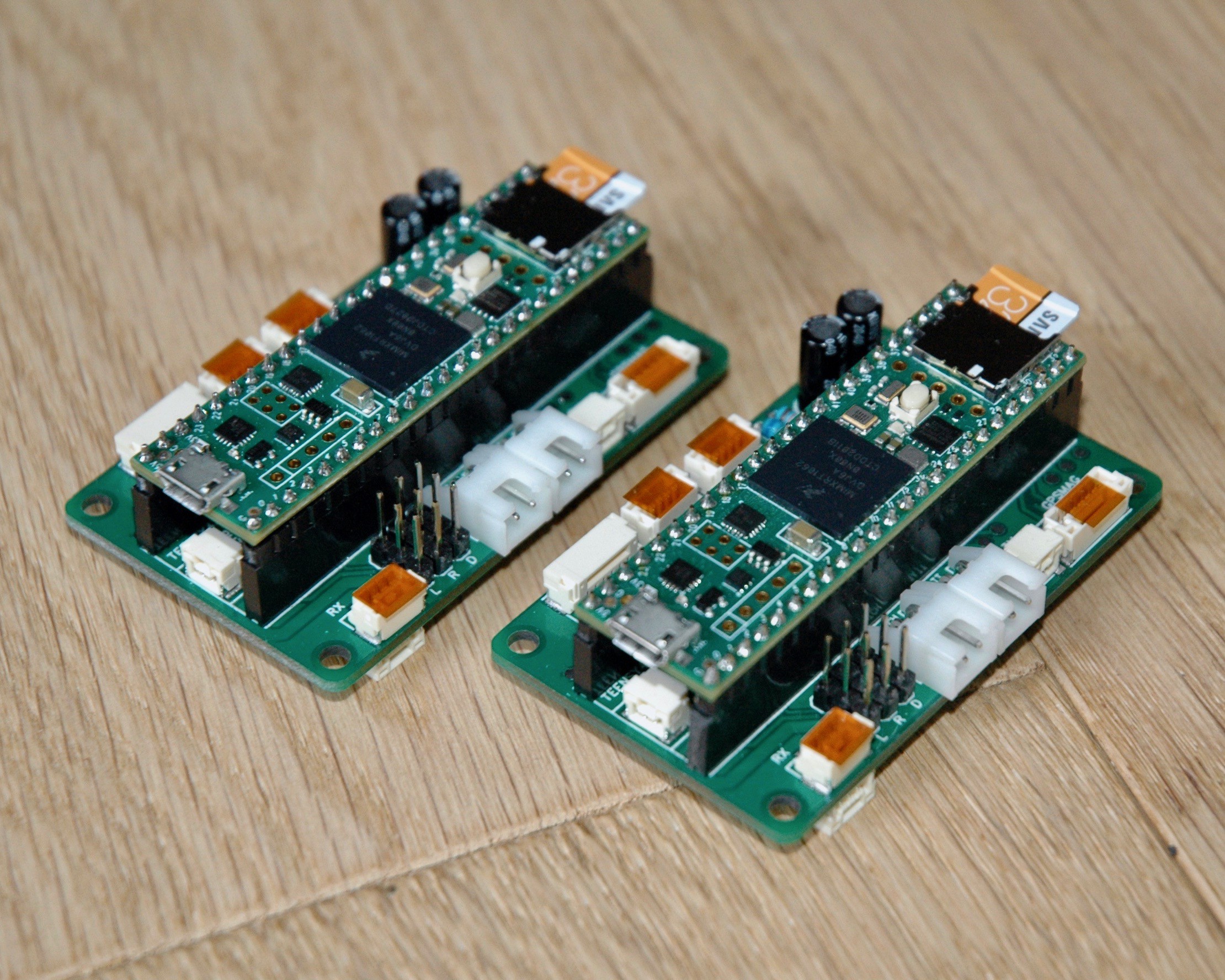
The brain of the computer is still a Teensy4.1, but the PCB enable the use of very convenient connectors to connect all external components as well as an integrated power supply circuit for the servo motors, and another one for the computer itself.
With it, a very new version of the system has also been designed and is now waiting to be built.

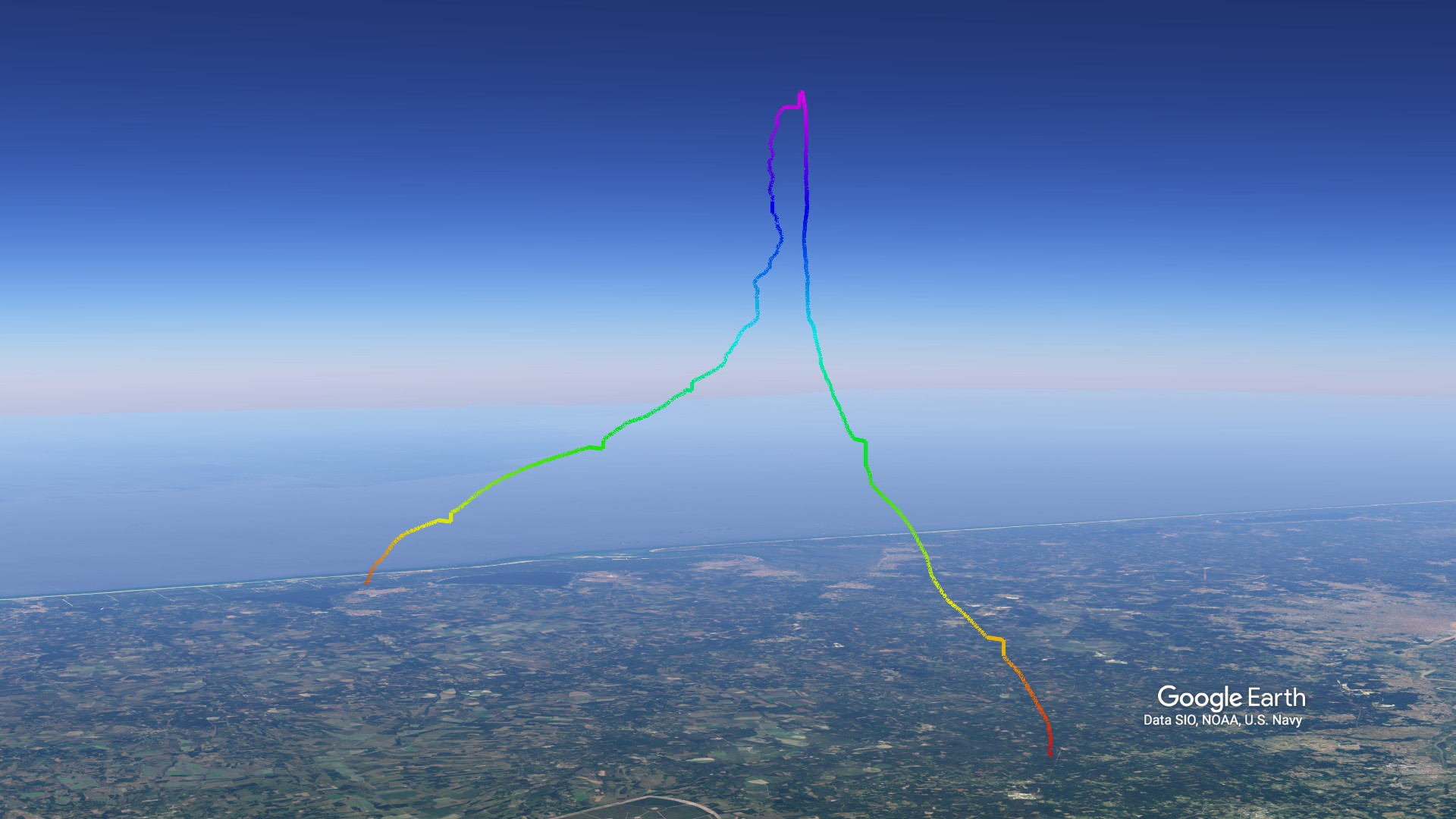
A prototype of the actual on-board computer has been successfully tested as a secondary payload on a weather balloon flight on May 26th. The objective was to validate the general operation of the computer in real flight conditions as well as the operation of the GPS device on high altitude ( > 30km).
More than 17000+ lines of data were recorded and all subsystems were successfully tested and validated.
Here is as an example of the data recorded, the 3D trajectory :
2. The project and it's supports
At the beginning of May the project was selected as one of the 3 winners of the earth day challenge organized by hackaday among 70 projects. Thanks once again to hackaday! This helped the project to gain (again) a little more visibility.
https://hackaday.io/contest/176995-earth-day-challenge
https://hackaday.com/tag/earth-day-challenge/
This also helped to trigger some serious discussions with several institutions to support the project.
In particular with the CNES (the "French NASA"). However, it is impossible for them to directly support an individual, and I'm also still a minor. So I decided to join an association known as the Open Space Maker Federation, to find a more official framework to the project.
https://www.federation-openspacemakers.com
I am still the initiator of the project, but other people will also be able to work on the project within the federation. The federation also guarantees open source development.
3. What's next ?
I have about 3 and a half weeks ahead of me and few goals:
The first one is to document much more the system, with the complete publication of the current version (3D model, code, technical drawings, assembly instructions, explanatory videos)
The second one is to document much more the project. I'm a bit afraid to lose with the time all the reflexions that I had which pushed me to make some choices. I am thinking about a series of videos to explain everything, but I'm very bad at making videos of me talking in english.
The third one is to proceed to the assembly of the next version of the system and to test it in flight. The next milestone is to be able to open the wing automatically at a given altitude, and then to flight in a straight line at a given heading automatically too.
The last objective is to start working on the flight strategy, that is to say, concretely which trajectory is the smartest to reach the landing point.
- Are there some altitudes where the flight is more interesting than others?
- Is it necessary to take into account the weather forecast of the day?
- Is it better to try to fight the wind or is it better to fly into the wind?
These are all questions for which we will have to perform many tests before being able to find an answer.
Here are also the "bigger test" opportunities that will be available then :
- Test of the complete system dropped from a drone at 300-500m of altitude (with the competent authorities)
- Test of the flight computer only again on a weather balloon as secondary payload
- Test of the complete system as main payload on a weather balloon flight up to 30km of altitude, with the main objective to validate the deployment at 30km of altitude. The piloting of the wing will be optional.
If all these tests are conclusive, a general test, with deployment and piloting of the wing from 30km of altitude could be envisaged in a little longer time.
I will *try* to post an update here every of these three weeks to keep you updated, if you are using twitter you can also follow me to get more frequent and less formal updates : https://twitter.com/YohanHadji/status/1394587769758965761
As always, thanks to everyone supporting the project, see you soon for the nexts steps of the adventure!
- Yohan
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.