 Gaelle
Gaelle
In our testing so far, we found that the Crank (see image below) is the part of Stanley’s leg that is the easiest to break.

When the robot falls on its side, strong impacts on the tip of the crank are likely to occur, which causes it to snap.
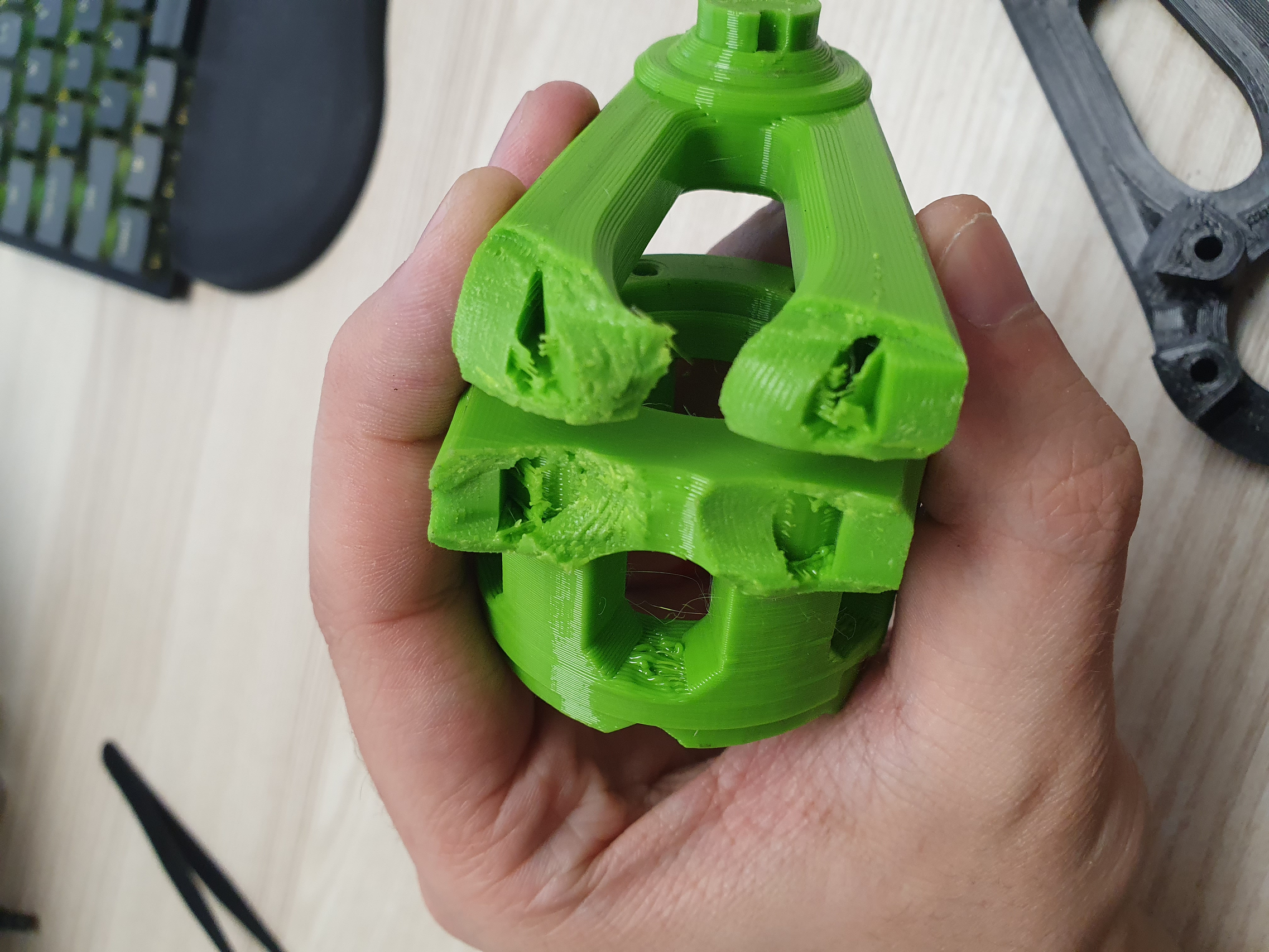
As seen in the picture above the snap occurs across layer lines, so layer adhesion does not play a role here.
We took two preventive measures against this. First - we switched the material we use from PET-G to Polycarbonate.
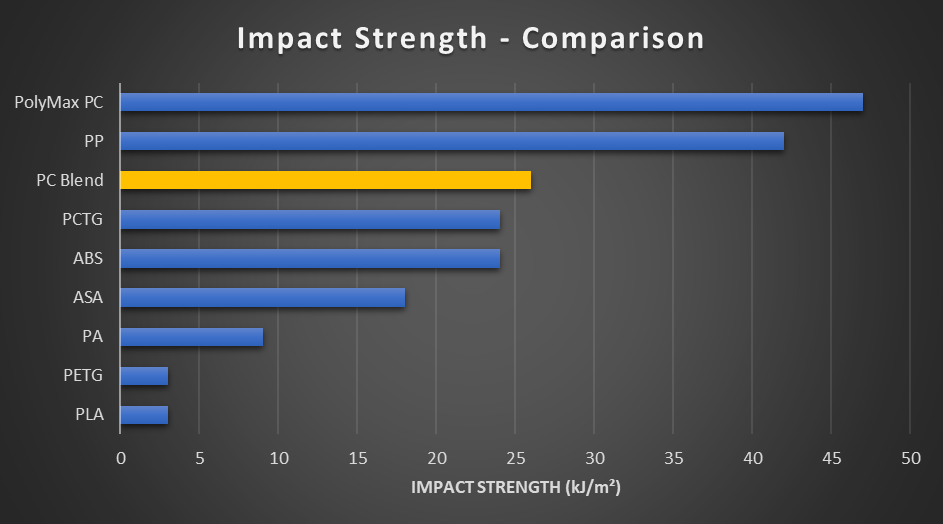
Source: https://www.cnckitchen.com/blog/prusament-pc-blend-review
Not only does Polycarbonate have a 40% higher tensile strength than PET-G, but its impact strength is an order of magnitude better, which makes it a perfect material for this demanding part.

The second improvement was the introduction of a TPU (Fiberlogy MatteFlex) bumper - to soften the impacts and prevent scratching. So far we haven’t seen this setup break, but we keep testing, and keep improving!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Why are those lever arms so long in the first place? My intuition says the axis-to-axis distance is about twice as long as it needs to be, but maybe there's something I'm not considering. Longitudinal force on the leg and curved bar from knee actuation would be doubled, but still doesn't seem like it would be excessive. Just beef up the curved bar a bit.
Are you sure? yes | no
There are two main reasons: first - geometrical - to allow the range of motion, the arm (we call it crank) needs to go "over (in a radial sense)" some features of the hip. This could be avoided by moving the mechanism out of the plane - but that would create twisting moments, probably also uneven wear of bearings and printed parts on which the bearings are mounted. This ties into the second reason - to limit the force exerted on the printed mounting points of bearings and the forces that we are putting on those small 15x21x4 bearings.
Are you sure? yes | no