 finallyfunctional
finallyfunctionalI've made motorized VR shoes in the past.
I was thinking about some of the challenges of motorizing VR shoes, especially if you want full omnidirectional movement. The three main issues I ran into where size constraints, weight, and weight distribution.
Motors, batteries, electronics, the drive mechanism, and other components all add weight and take up space in the shoes. The weight and small size constraints are the hardest to deal with, especially if you want shoes for people with small feet.
For weight distribution, the user will shift their weight between the ball of the foot and heel as they walk. A while ago I built a pair of massive motorized omnidirectional shoes that used omniwheels. Some omniwheels were for forward/backward motion, some were for side to side. I found that I could distribute my weight onto the wrong set of wheels, so the other set had no traction. I go into more detail and show what this looks like in this video. Some sort of suspension system was needed.
I've had the idea for a while now that maybe to deal with the size constraints, some of the components don't have the be in the shoe itself. This isn't new, the University of Tsukuba shoes had the motors mounted in a backpack. But I was thinking that maybe they could be mounted on the back of the user's calf to avoid having to run something all the way up to the user's back.
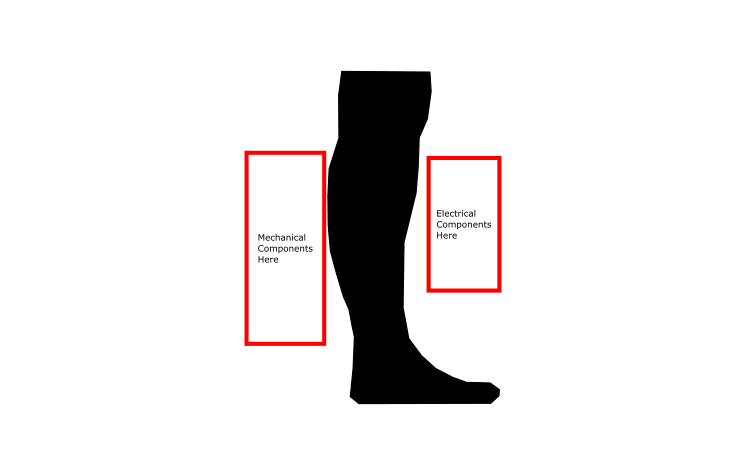
So maybe have a frame similar to running stilts, part of which does rest on the back of the user's calf, and mount motors and electronics there to keep the shoe itself smaller. That would provide a lot more room to play with.
That idea doesn't deal with the weight and distribution of weight problems. I was thinking what if the VR shoe itself is passive, and behind the VR shoe is a motorized caster connected to vertical rods that can slide up and down along the frame that is on the user's calf.
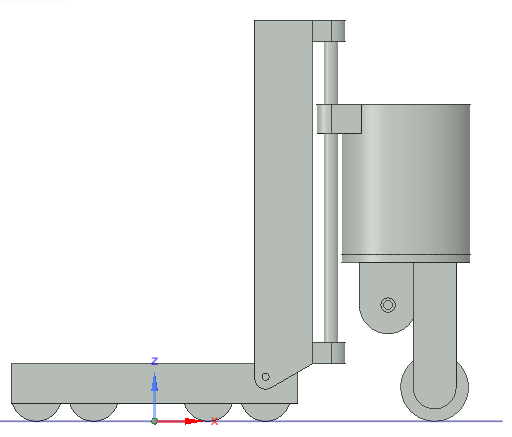
There would be a mechanism using springs that push the motorized caster into the ground, such that when the user lifts their foot, the springs push the shoe up and therefore the caster down, keeping the wheel in contact with the floor. To deal with the weight of the whole device, as the springs push the caster down, they also help the user lift their foot, negating the weight.
For distribution of weight, if the springs are strong enough and push into the ground hard enough, they should always have traction...theoretically.
The motorized caster could be something similar to what the Summerboard uses. Omniwheels could be used too, but a reason I don't really like them is they can't be used on a squishy, rubbery surface like I use in my current setup. That kind of surface reduces noise and increases traction. But omniwheels won't work on them because there isn't enough space between the rollers and the frame of the omniwheel itself.
So in summary, have a frame that runs up the back of the user's calf and mounts to the shoe, similar to running stilts. It could have a pivot point around the ankle. Mount a spring loaded vertical rod to the frame on the calf. Have a motorized caster coupled to the vertical rod. The springs will negate the weight of the device and make sure the caster always has traction. The calf frame allows components to be mounted there, getting around space constraint.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.