 AdityaPrakash23
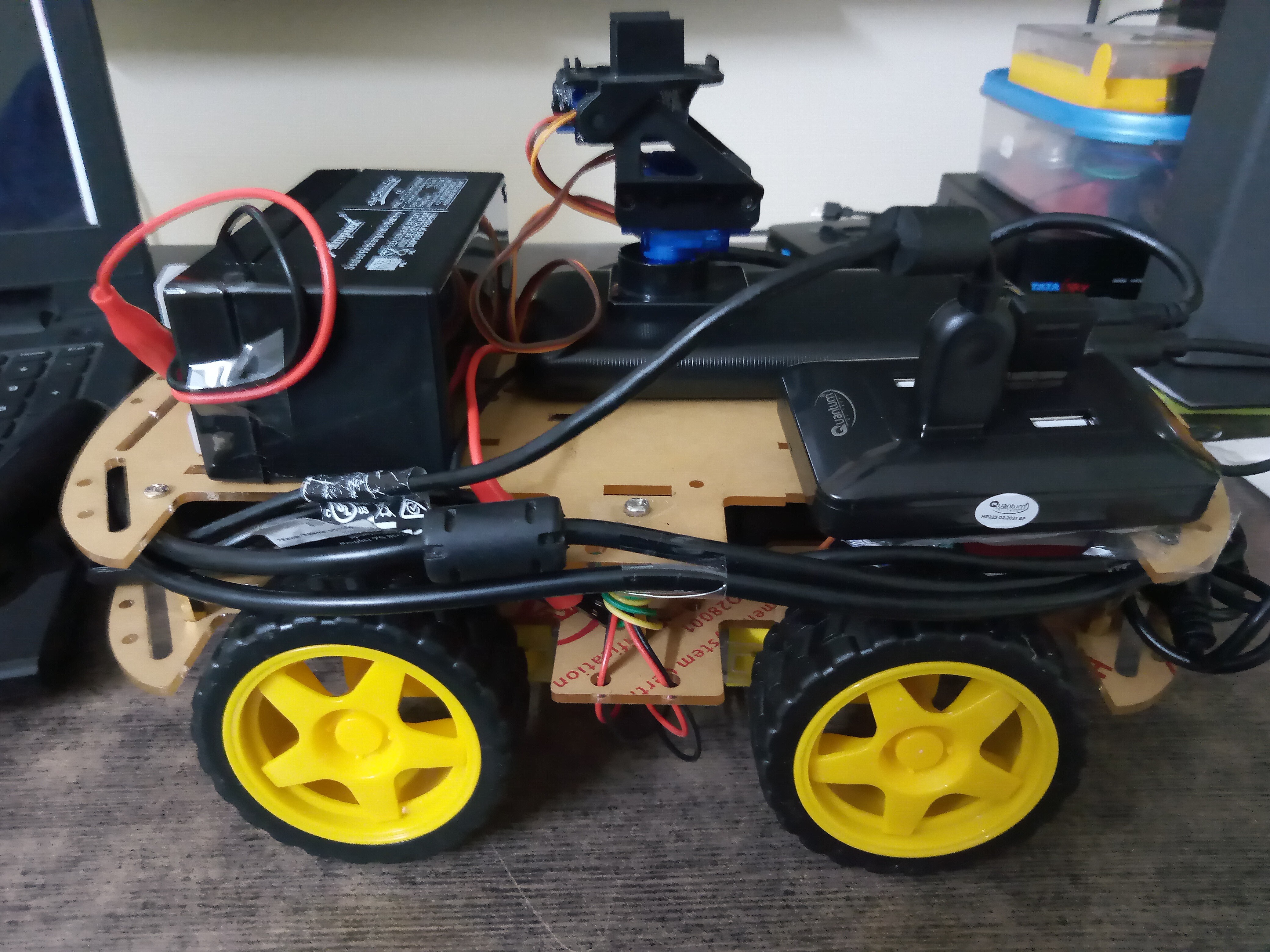
AdityaPrakash23So everything is done. I assembled up the bot with the battery(which adds quite a weight to the bot). I then started to run it around. But the bot isn't able to turn left or right without some forward or backward momentum. The main culprit I believe is the battery. I plan to solve this problem in my ROS robot by putting a screw support and a castor wheel below it to bear the weight of the battery. I hope it works out. This was a really nice simple project and I will use parts from this to make my ROS test bot(name in progress). I have gotten some of the components and will start work on it. Also I will open up a new project entry to log my progress there. Anyway, here are some pictures and videos. See you in the ROS bot project.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.