Yuhai ZhongLo primero que se hizo fue seleccionar el tipo de robot que se estaría diseñando. Este podía ser un Quadruped o un Hexapod. Investigando sobre las diferencias entre los diferentes tipos de robots, se encontró el trabajo de Palivela Arun y Shivraj Yeole. En este se realiza esta comparación entre robots bípedos, cuadrúpedos y hexápodos.
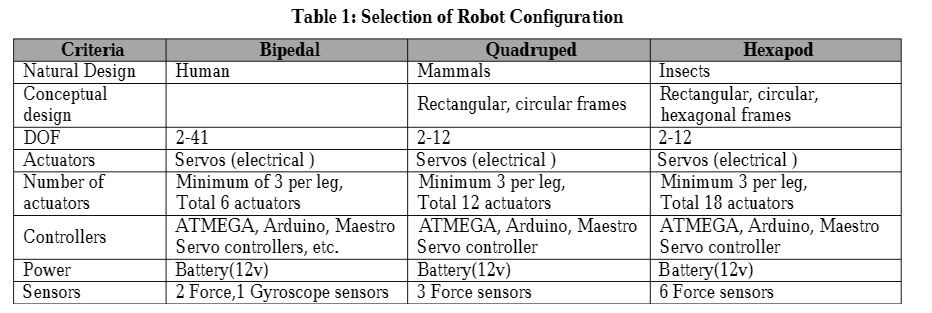
La imagen anterior muestra la Tabla 1 de esta comparación. Esta muestra algunos parámetros de construcción para cada uno de ellos, como la cantidad de grados de libertad posibles, número de actuadores, sensores, etcétera. De aquí únicamente se tomarán en cuenta los cuadrúpedos y hexápodos ya que son las dos opciones planteadas. Las diferencia notoria entre estos dos es que los hexápodos necesitan de una mayor cantidad de actuadores y de sensores para poder realizar un control adecuado manteniendo la misma cantidad de grados de libertad.
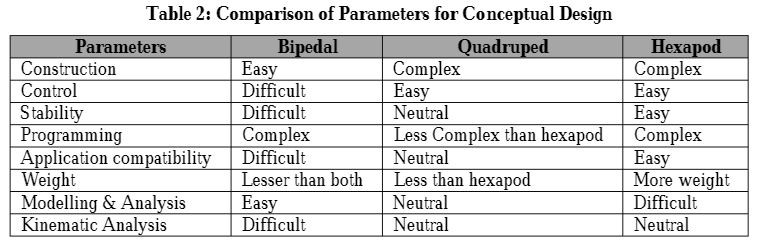
La Tabla 2 del mismo documento nos muestra puntos de comparación un poco más ambiguos (ya que utiliza escala de fácil a complejo), pero orientado a el diseño y programación del robot. Los puntos más importantes a notar son que los cuadrúpedos son más inestables y más difíciles de encontrar aplicaciones; pero en general, estos también son mucho menos complejos de programar y modelar ya que cuentan con menor cantidad de partes móviles que se deben sincronizar para mantener un movimiento fluido. Ya que el propósito de este proyecto es lograr modelar, diseñar y programar un robot, no es de mayor relevancia que sea complicado encontrar aplicaciones y, a pesar de que agregar dos piernas extra mejora la estabilidad, no significa que los cuadrúpedos no lo sean. Por lo que dejando estos aspectos de un lado, se seleccionó un cuadrúpedo porque este es más sencillo y menos complejo.
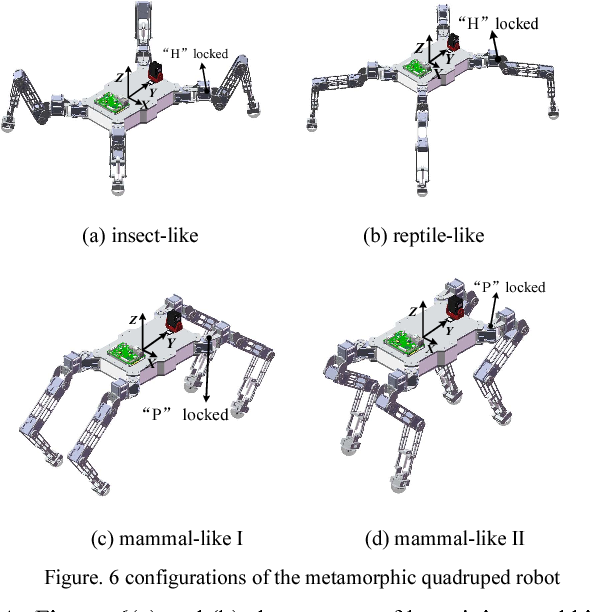
Sabiendo que se trabajaría un cuadrúpedo, se encontraron distintos modelos de estos. Existen robots inspirados en: insectos, reptiles y más de una configuración de mamíferos. En la siguiente imagen se pueden ver las diferencias entre los mencionados.
Investigando más sobre estos tipos de configuraciones, se encontró lo siguiente:
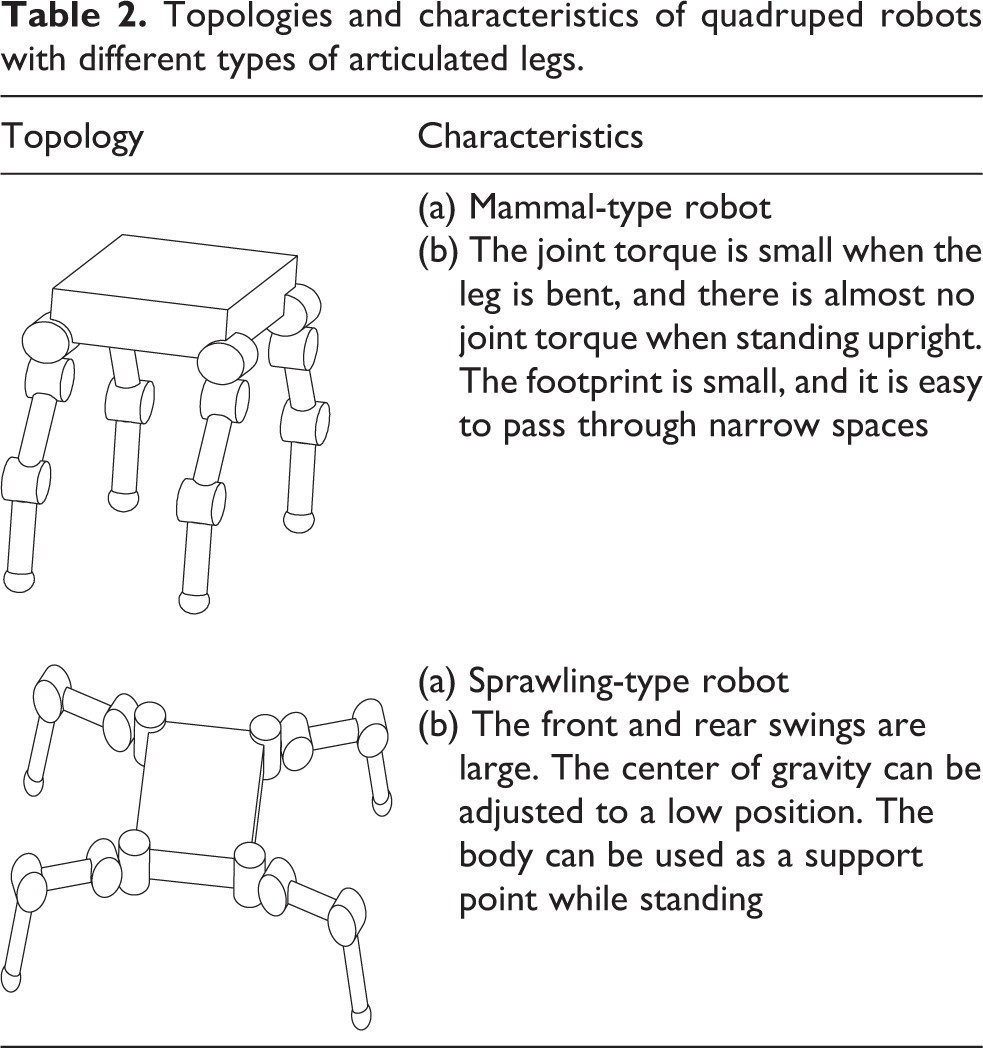
Esta imagen es la Tabla 2 del trabajo de Yuhai Zhong, Runxiao Wang, Huashan Feng y más. Aquí se analizan y comparan distintos tipos de piernas para robots cuadrúpedos. En este análisis se concluye que los mamíferos tienen mayores velocidades de caminata y necesitan menor torque, mientras que los otros tienen mayor estabilidad y mayor rango de movimiento. Ya que no se busca diseñar un robot para una carrera, la velocidad no es un factor determinante. Y el problema del torque se puede solucionar utilizando tamaño de extremidades mínima. Por el otro lado, es beneficioso que tenga mayor estabilidad ya que se necesitará menor robustez del controlador, dando más holgura en los parámetros.
Y, por último, a pesar de que es totalmente posible tener un robot con dos grados de libertad funcional, se decidió utilizar tres servomotores para cumplir con los tres grados de libertad mínimos para un cuadrúpedo (como se vio al principio) para que este tenga un movimiento fluido.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.