 Jrsphoto
JrsphotoI spent some time tonight getting the Onstep controller mounted and the motors wired. I have not connected the alt/az limit switches yet, though they are wired up.
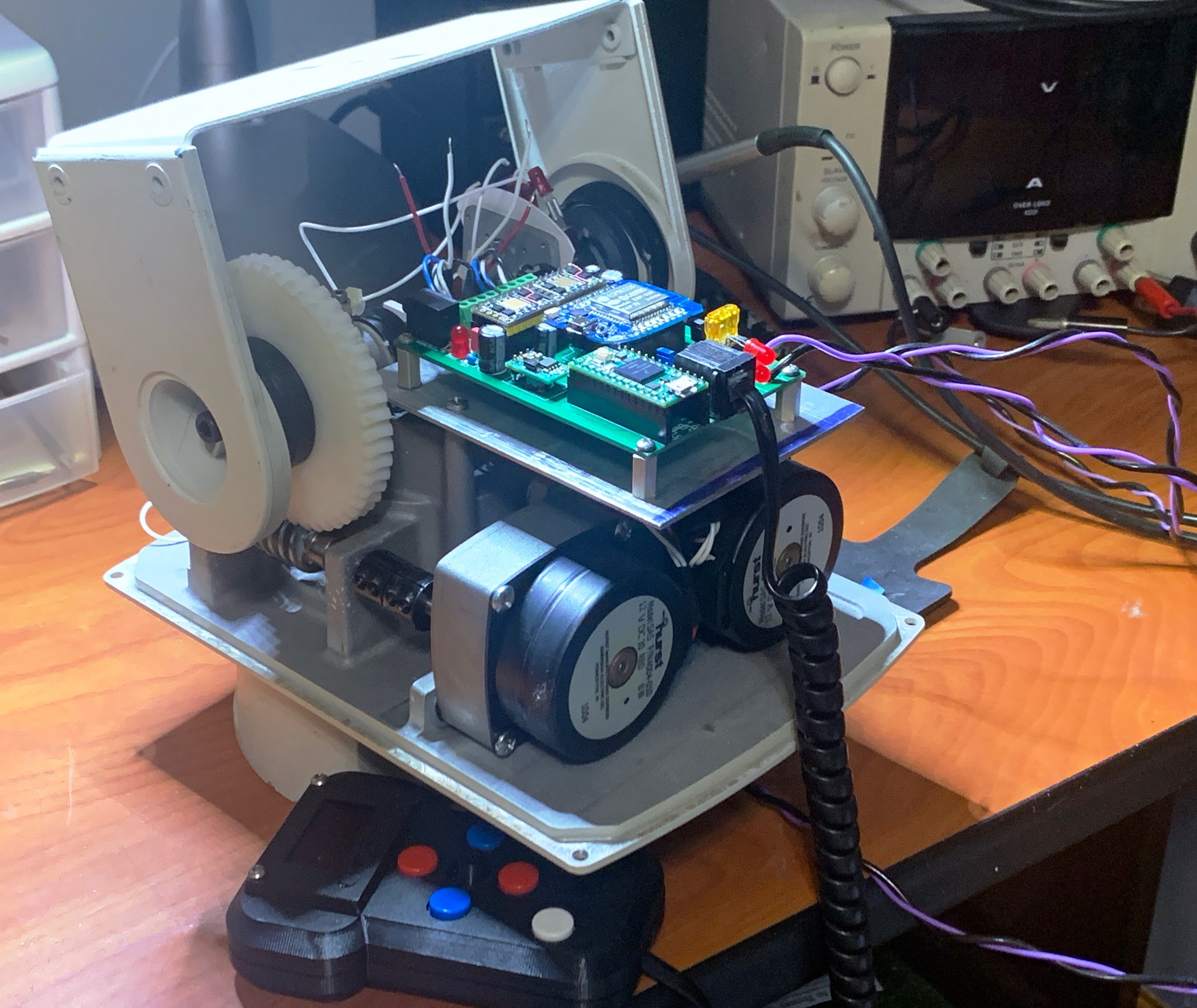
I’ve done some minimal testing with hamlib’s rotctld, rotctl, and gpredict, and things look good. Some issues with slewing speeds given the 0.25 deg/ step of these motors, but this was expected. How I’ll deal with this I’m not exactly sure. I’ll post a video link tomorrow.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.