Earlier I mocked out some arms to be used with Dynamic Actuators which are about 4" in diameter. There are 2 problems with the arms. Firstly the torso with 4 actuators is a little heavy for dynamic actuators. Secondly, the arms look a little husky. Recently I found these...
https://www.robotshop.com/en/my-actuator-rmd-x6-s2-brushless-dc-gear-servo-motor-136-mc300a.html
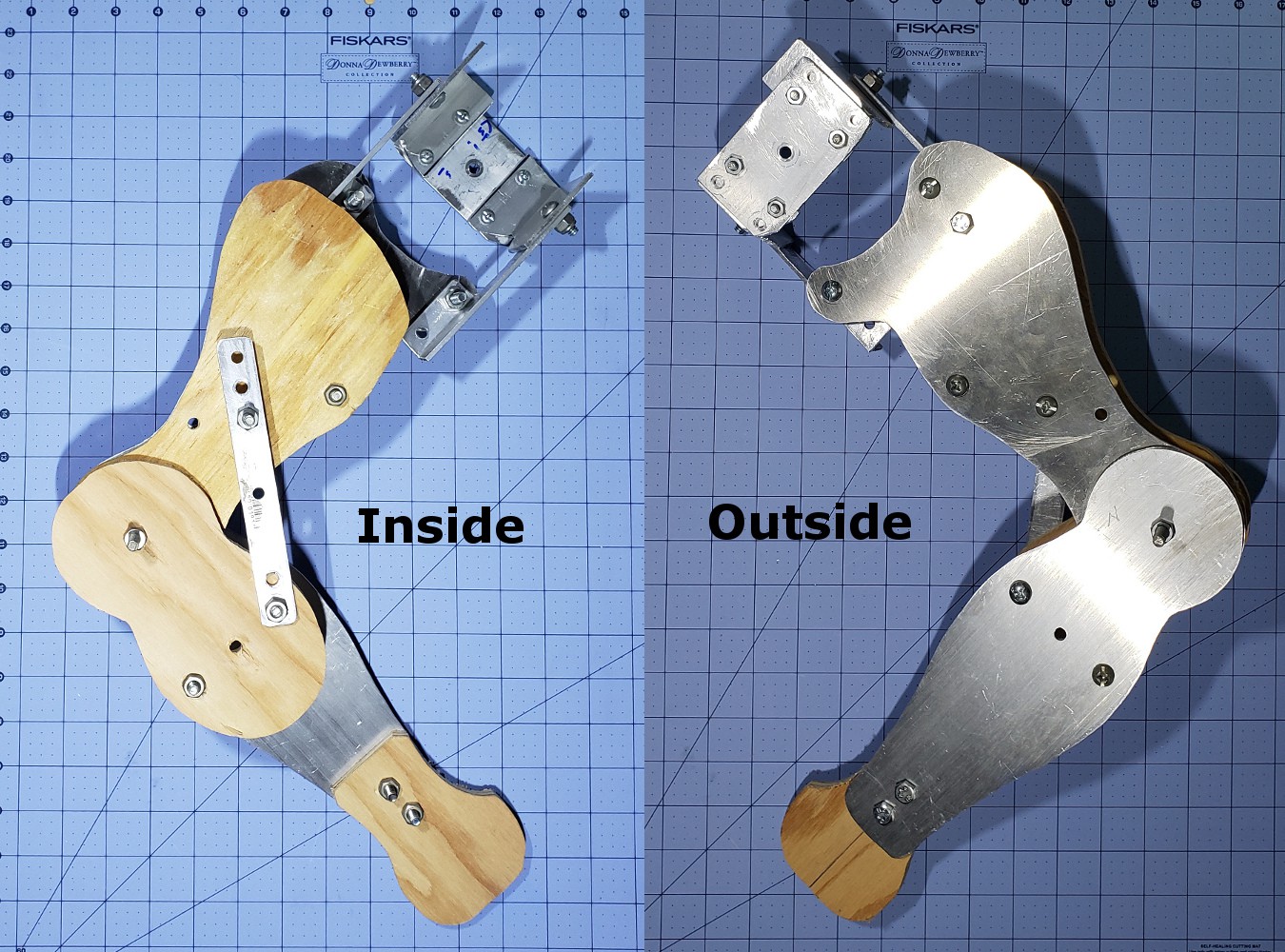
They have a 36x gearbox, so I don't think they are back drivable, and hench not dynamic? But at 36x they have a little more torque, so I could use them with my 4 axis torso. Secondly they are 3" diameter so they look alittle sleaker. I made a second set of arms for the 3" 36x actuator. I think if someone wanted to make a "sport" robot, you could use a 2 axis torso with a rigid spine in the rib area, and use 4" dynamic actuators. If you didn't care about dynamics you could use a 4 axis spine with the 3" 36x actuator with the sleaker arms.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.