 M TECH IDEAS
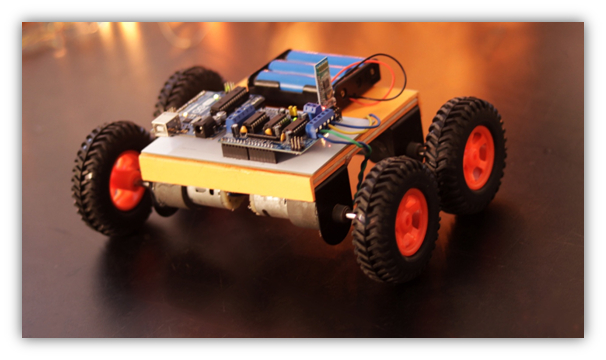
M TECH IDEASA new tutorial! This time I chose to build an Arduino Bluetooth Controlled car. This is the easiest Arduino Robot Car and a very popular Arduino Project for beginners. I will explain every single thing in this article and have made a tutorial video on YouTube. Hope this will be a perfect article for your DIY Arduino Bluetooth Controlled Robot Car…
Things used in this project
Hardware components
- ARDUINO UNO
- L293D MOTOR DRIVER
- HC-05 BLUETOOTH MODULE
- JOHNSON MOTOR
- WHEELS
- 18650 LI-ION BATTERY
- 18650 LI-ION BATTERY HOLDER
- CHASSIS FOR ROBOT BODY
- PCB BOARD BY JLCPCB
- JUMPER WIRES
SOFTWARE COMPONENTS
Hand tools
- Soldering iron
- Drill Machine
- Glue Gun
Story
Hey guys! I hope you already enjoyed my previous projects and you are ready for a new one,
as usual, I made this tutorial to guide you step by step while making this kind of super amazing low-cost electronic project which is the "Bluetooth Robot Car".
During the making of this project, we tried to make sure that this instructable will be the best guide for you in order to help you if you want to make your own Bluetooth Robot Car,
So we hope that this instructable contains the needed documents.
This project is so handy to make especially after getting the customized PCB that we’ve ordered from JLCPCB to improve the appearance of our machine and also there are enough documents and diagrams in this guide to allow you to create your Bluetooth Robot Car easily.
We've made this project in just 3 days only, just 2 days to get all the needed parts, and the next 1 day to finish the hardware making and the assemble.
Before starting let’s see first What you will learn from this instructable:
- Making the right hardware selection for your project depending on its functionalities.
- Prepare the circuit diagram to connect all the chosen components.
- Assemble all the project parts (mechanical and electronic assembly).
- Finally designing your own ARDUINO-based Bluetooth Controlled Robot Car.
How Arduino Bluetooth Controlled Car Works?
This is a simple Micro-controller based car. The Micro-Controller is connected in the car. The Arduino is doing all this job. For receiving data wirelessly we are using the HC-05 Bluetooth module.
At first, We have to connect/ pair the Bluetooth module with the phone (Android) you want to control. Now, we are doing different operations such as when we press the forward button then the Phone sends a data value to the Bluetooth module.
Next, we have to code in a way that if Arduino Gets a Certain Data (Suppose ‘F’ for forwarding) we have to make a certain condition for running the car in a certain direction. So, basically, there are many switch cases in the Arduino code. For a known condition or a switch case, the car will perform the added functions in the code.
In the Same way, F, B, L, R are used for moving the car Forward, Backward, Left, Right movements.
Here is the video of Arduino Bluetooth controlled Robot Car
This video will help you to make your own robot easily.
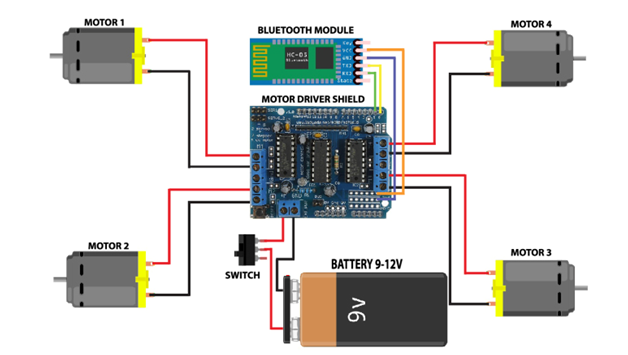
Schematics of the Bluetooth Control Car with L293D:
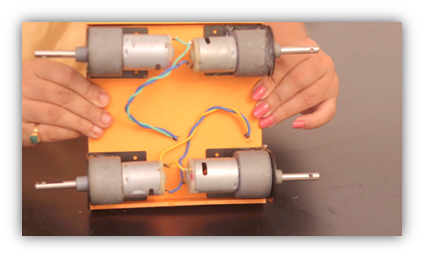
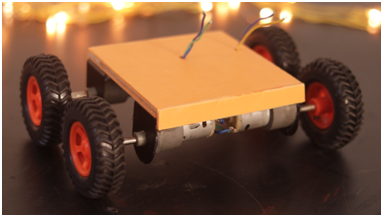
STEP 1
In this step, I have made the Robot Body using PVC Boards. I have also attached the motors with the Chassis and have soldered them with some wires.
Here is how it looks like
STEP 2
I have made a PCB file to make it easy to assemble and ordered my PCB from JLCPCB. They are very professional in PCB making and the build time was short. I received my item within 7 working days.
After getting the PCB it was just a less than 2 minutes job to assemble all the components in a proper way.


STEP 3
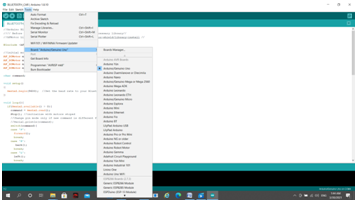
Now I had to upload the code to the Arduino UNO.So I have attached the USB cable that comes with the Arduino UNO board and follows the steps mentioned below
- Open Arduino IDE on your PC
- Connect ARDUINO with PC via USB Cable
- Go to Tools > manage libraries > Search for AF Motor driver and download
- Go to Tools > Board > and select Arduino\Genuino UNO
- Go to Tools > Port > Select proper COM port
- Now Verify the code and then upload it
***Please don’t forget to remove/detach the HC-05 Bluetooth Module before uploading the code. Connect it after the code has been uploaded successfully.
STEP 4
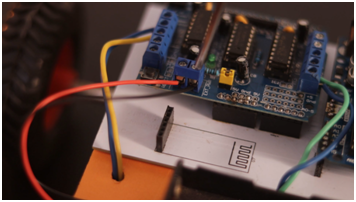
Here in this step, I have attached the PCB board with the robot body / Chassis and connected the motor terminal with the output terminal of the L293D Motor Driver. I have also attached the 18650 Li-ion battery holder with the chassis and connected the output wires of the battery holder with the input power terminal of the L293D motor driver.
STEP 5
Here in this step, I have attached the 18650 Li-ion batteries with the battery holder and finally, the motor turns on.

STEP 6
Now you will need the app for controlling the car. I have given the Application link in the code you can directly download from there and install it on your Android device.
At the next open, the application then clicks on the small gear button in the app. Then you will find an option called ‘Connect to Car’. After that, you have to select the correct Bluetooth option. For our case, it is HC-05 click on that.
About JLCPCB
JLCPCB (Shenzhen JIALICHUANG Electronic Technology Development Co., Ltd.), is the largest PCB prototype enterprise in China and a high-tech manufacturer specializing
in quick PCB prototype and small-batch PCB production. With over 10 years of experience in PCB manufacturing, JLCPCB has more than 200, 000 customers at home and abroad,
with over 8, 000 online orders of PCB prototyping and small quantity PCB production per day. The annual production capacity is 200, 000 sq.m. for various 1-layer,
2-layer or multi-layer PCBs. JLC is a professional PCB manufacturer featured of large scale, well equipment, strict management, and superior quality.
Troubleshoot:
- The programmer is not responding: If you face this error then it may be because of the Bluetooth Module. Always Disconnect the RX and the TX pins before uploading the code to the Arduino.
2. The motor is not rotating in the right direction: If you face this issue then you don’t need to modify any code. You just have to Interchange the motor wires. In a simple way, I can say just connect the Motor to the Motor driver