 Josh Pieper
Josh PieperI'm excited to announce beta availability of a new controller in the moteus lineup, the moteus-n1! This new version is in addition to the existing moteus r4.11, but adds more capabilities, a smaller mechanical profile, and has an increased maximum voltage of 54V.
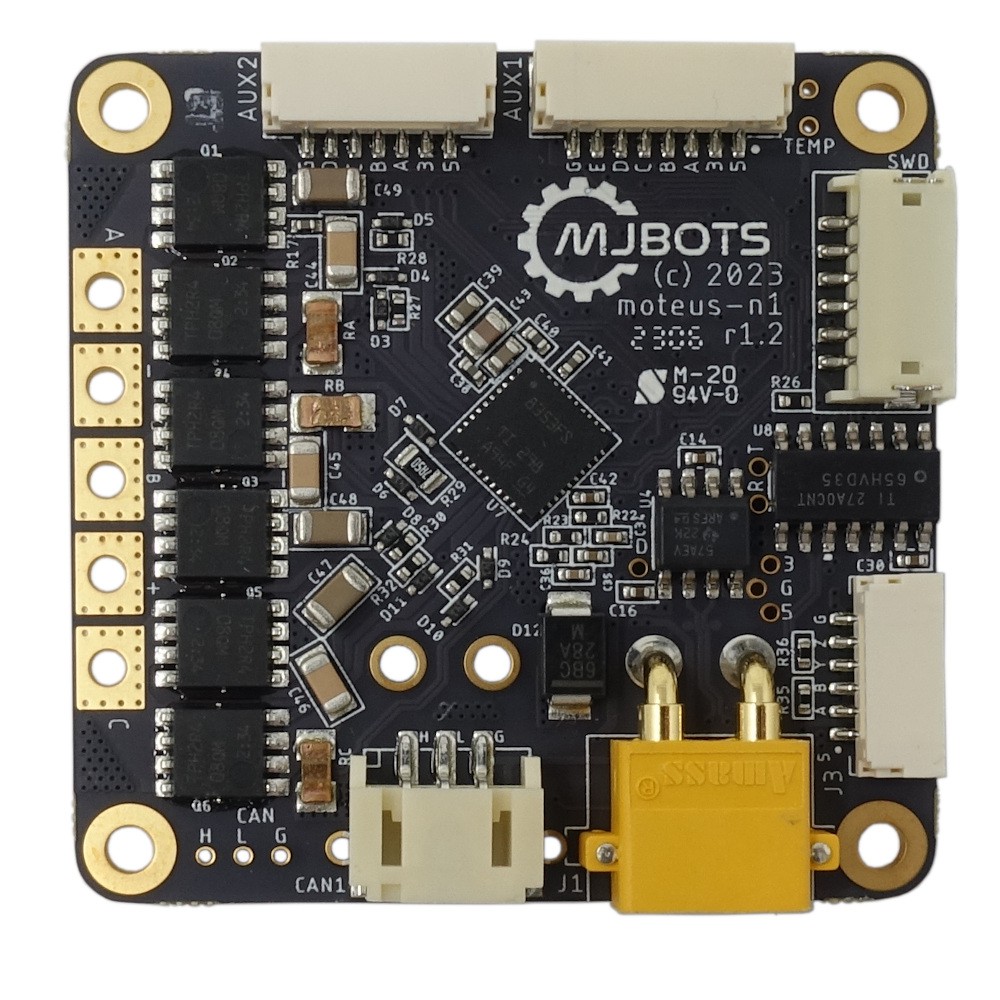
External Peripherals
The biggest new feature in this new version is improved external peripheral support. The r4.11 had an "aux2" connector with exactly 2 pins. The moteus-n1 has 2 external connectors, aux1 and aux2. Aux1 has 5 pins and aux2 has 4 pins. Each of those can support any of SPI, I2C, ADC, UART, GPIO, Quadrature, or Hall sensors.
There are many more exposed 5V tolerant inputs. All 4 user pins on aux2 are capable of 5V, which means most hall effect sensors can be connected with no additional level shifters required.
Both connectors also provide 3.3V and 5V power (up to 100mA for each rail) to power external peripherals.
Hard I2C pullups (2.2k) are available on both aux1 and aux2, but are now configurable on both.
Both aux1 and aux2 have some pins that can now be used for hardware quadrature support, which enables much higher count rates than the software support which is still available on any pin.
Note that three of the aux1 pins are multiplexed with the onboard magnetic encoder as were 3 of the pins of the ENC connector on r4.11. To use those pins, the onboard encoder needs to be disabled.
Finally, there is a dedicated RS422 transceiver connected to the UART pins of aux1, that can be used to drive things like the AksIM-2 encoder with no additional interface required.
Electrical Characteristics
The peak and continuous output phase current is the same as the r4.11. That is 100A peak, 10A continuous with no thermal management and 20A continuous with maximal heatsinking. However, the peak electrical power has been increased to 1200W and the maximum input voltage is increased to 54V, enabling operation on 48V bus systems.
Also, the CAN transceiver now has +-58V fault tolerance, compared to the +-12V fault tolerance of the r4.11.
Mechanical
The new profile is square, and has all the phase terminals along one edge of the board. The same XT30 and JST PH-3 connector for power and data as used in r4.11 are available on the top side of the board, and no connectors are by default present on the bottom, drastically decreasing the overall volume. Daisy chained connectors for both power and data can be optionally installed on the bottom.
Software
moteus-n1 uses the exact same firmware images as r4.11 and provides an identical CAN interface as all previous moteus controllers. If you are not using the new peripheral capability, it will be a drop-in replacement in existing r4.11 applications.
The firmware and electrical designs continue to be open source, under the Apache 2.0 license and are in the same place on github!
Beta Availability
To start, the limit is 2 controllers per person for this beta round. The mjbots.com store also has new accessories for heat sinks, developer kits, connector housings, and pre-crimped wires to let you build systems and cable harnesses for all the new ports. Check out the list in the official blog post.
Happy motion control!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.