Kasper Kornak
Kasper KornakOpis działania robota

Jako pierwszy uruchamia się algorytm pozycji startowej:
Algorytm ustawienia pozycji startowej
Silnik (B) podnosi most do momentu, gdy krańcówka (4) wykryje most. Następnie silnik (B) zatrzymuje swoją pracę, a silnik (C) przesuwa most w lewo do czasu, kiedy krańcówka (1) wykryje podporę.
Algorytm główny
Jako pierwszy uruchamia się silnik (A) w celu podjazdu do krawędzi. Gdy czujnik (2) wykryje przepaść, silnik (A) zatrzymuje swoją pracę. W tym momencie silnik (C) rozpoczyna swoją pracę i przesuwa most w prawo jednocześnie licząc wykonane obroty (n) . Przeliczenie obrotów na odległość kanionu (d) jest wyrażone wzorem: d = 2nπR. Następnie możemy wyróżnić trzy przypadki, które mogą wystąpić:
1. Czujnik (3) wykrywa przeciwległą krawędź. Silnik (C) się zatrzymuje. Jeżeli l-d > 2p, to silnik (C) wysuwa most o odległość p, następnie silnik (B) opuszcza most licząc obroty. Po opuszczeniu mostu silnik (C) uruchamia się, następuje przejazd robota po moście, dopóki krańcówka (1) nie wykryje podpory. Wówczas praca silnika (C) zostaje wstrzymana, silnik (B) opuszcza robota o wcześniej zliczoną liczbę obrotów. Algorytm uruchamia się od nowa.
2. Algorytm przebiega analogicznie jak w pierwszym punkcie, jednak w momencie, gdy zostaje zatrzymana praca silnika (C) wartość l-d <= 2p. Wówczas silnik (C) wsuwa most z powrotem o wcześniej policzoną ilość obrotów, zostaje wykonany algorytm anulowania akcji. Program się kończy.
3. Algorytm przebiega analogicznie jak w pierwszym punkcie, jednak w momencie, gdy silnik (C) przesuwa most w prawo, jednocześnie licząc obroty, czujnik (3) nie wykrywa przeciwległej krawędzi. Wówczas zostaje zastosowany algorytm anulowania akcji oraz algorytm ustawienia pozycji startowej.
Algorytm anulowania akcji
Silnik podjazdowy (A) cofa robota. Uruchamia się algorytm ustawienia pozycji startowej. Program się kończy.
Schematy blokowe działania algorytmu można znaleźć w plikach.
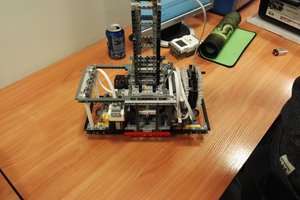
Układ mechaniczny
Projekt robota został podzielony na cztery zasadnicze części:
- podwozie,
- podnośnik,
- część przejazdowa,
- most.
Do realizacji naszego robota zastosowaliśmy trzy silniki.
Podwozie napędza jeden silnik, przy którym zastosowano przekładnie 3:5, w celu zwiększenia momentu obrotowego tylnej osi. Do obsługi podnośnika również zastosowano przekładnie redukcyjna o i = 1:3. Zespół konstruujący część przejazdową robota, po wnikliwej analizie, wybrał przekładnie 1:1.
Silnik napędzający podwozie został zamontowany z tyłu podwozia oraz prostopadle do płaszczyzny przejazdu, w celu odpowiedniego rozmieszczenia masy w układzie oraz w celu łatwiejszej aplikacji sensorów w przedniej części podwozia.
Artykuły szczegółowo opisujące każdą z części mechanicznych można znaleźć w plikach.
Układ elektroniczno-sensoryczny oraz rozwiązania informatyczne
Do wykonania projektu wybrano moduł sterujący i sensory z serii Lego Mindstorms NXT.
Sensory rozmieszczono tak, jak na rysunku 1:
- Czujnik (1) - krańcówka; wykrywa moment, w którym podwozie dojeżdża do podpory mostu,
- Czujnik (2) - czujnik ultradźwiękowy; w momencie, w którym robot podjeżdża do przepaści, wysyła sygnał, aby rozpocząć algorytm pokonywania przepaści,
- Czujnik (3) - czujnik ultradźwiękowy; odpowiada za wykrycie przeciwległej krawędzi,
- Czujnik (4) - krańcówka; wykrywa moment, w którym silnik powinien przestać podnosić most....
 John
John
 Igor
Igor
 Cirmall
Cirmall