 Adrian Prinz
Adrian PrinzI started with the idea of building a small scal Hyperloop system, that is supposed to levitate and drive magnetically and independent of external power.
I started with a rough CAD design and improved it step by step
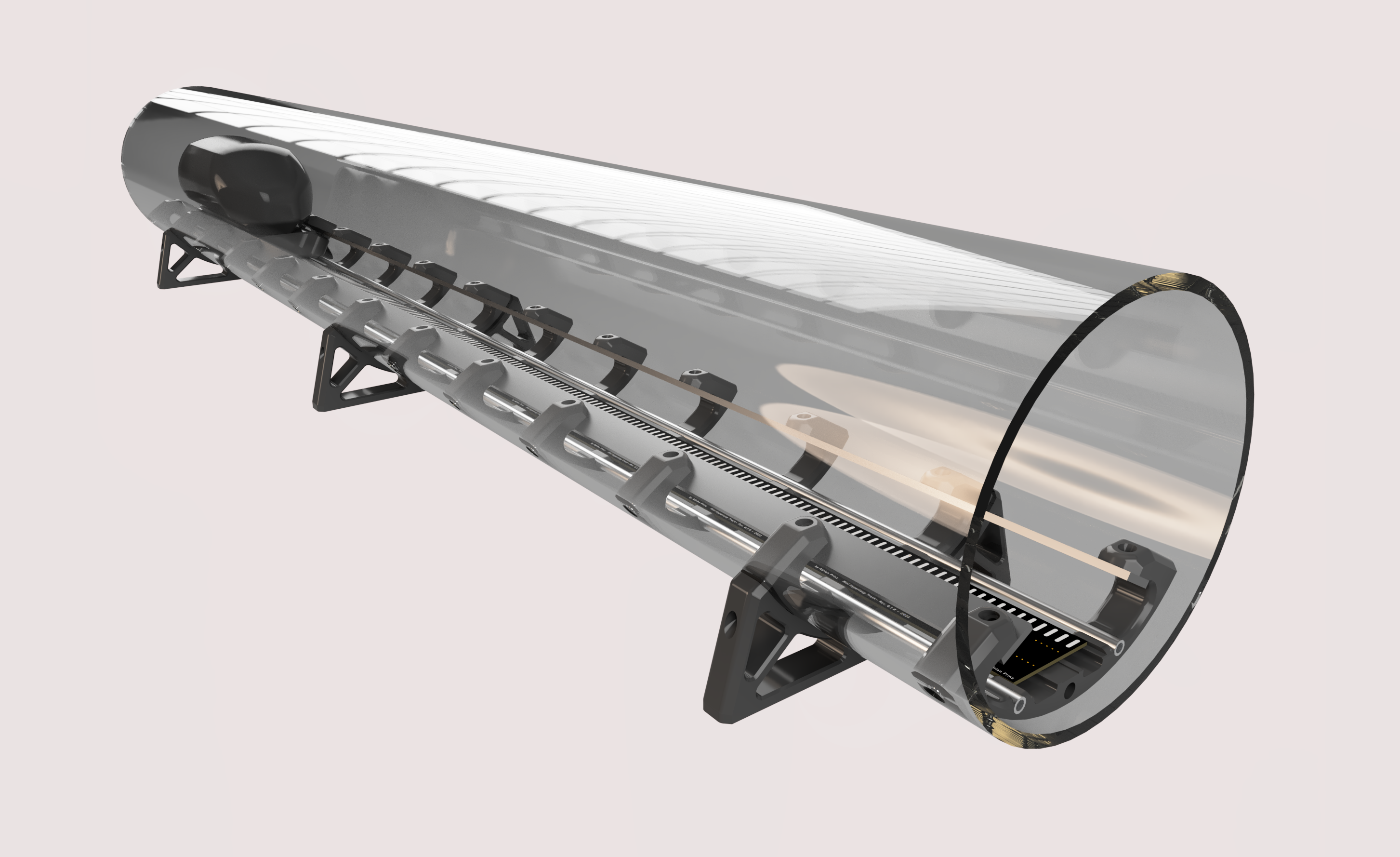
Pod in tube with track:
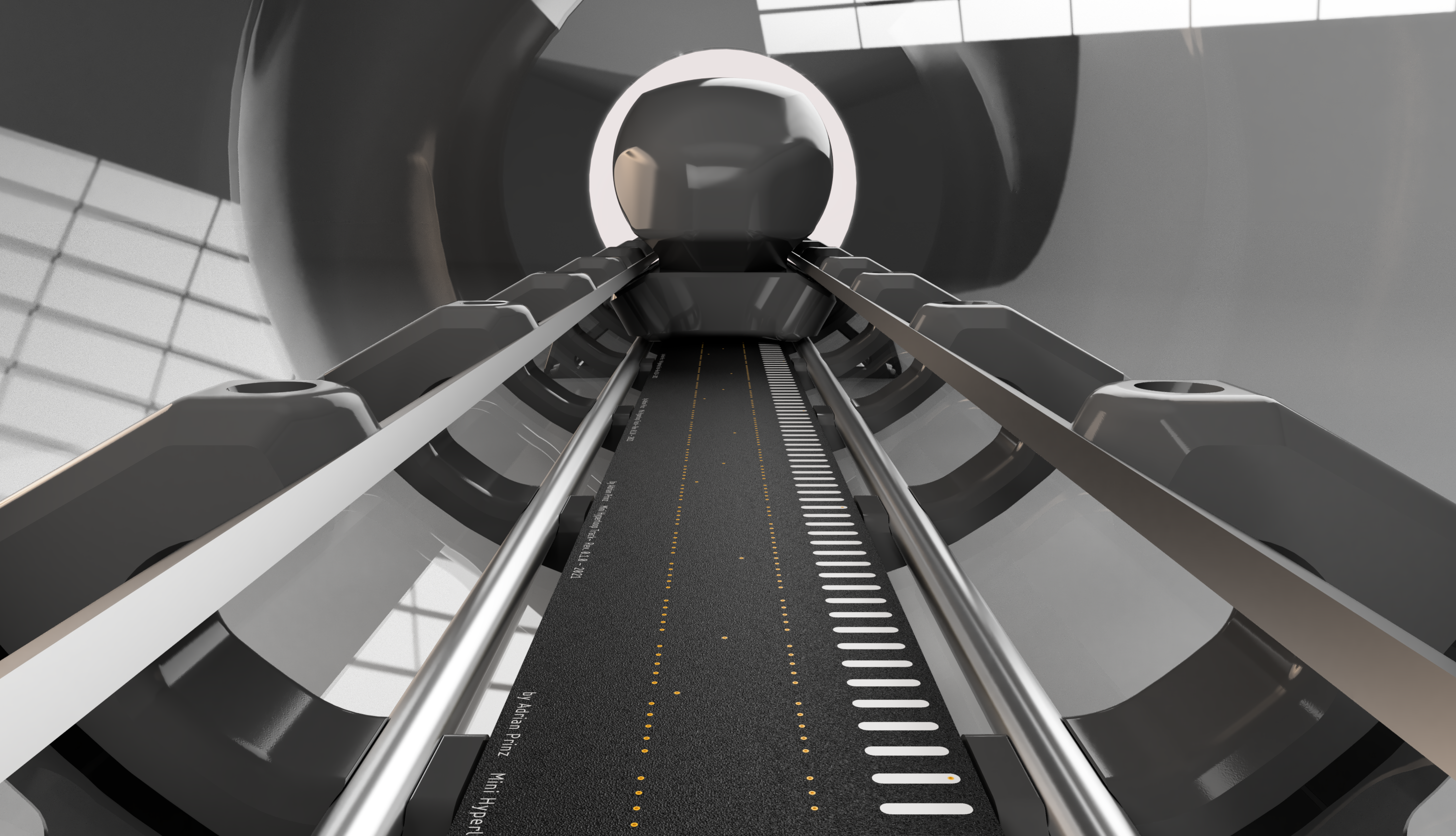
Pod (moving vehicle):

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.