 David H Haffner Sr
David H Haffner SrI am completely redesigning my project out of necessity, the new triple turret grating motor addition demands it, and will facilitate a far superior performance factor. The 8 bit CCD detector may sound slower but indeed will be compensated with superior optical focal equipment.
I still have not solved the 16 bit circuit problem and I'm just not going to mess with it any longer, so I am building the 8 bit right now. I am presenting my hand drawn sketch (not the best,) but it illustrates the concept well I think.
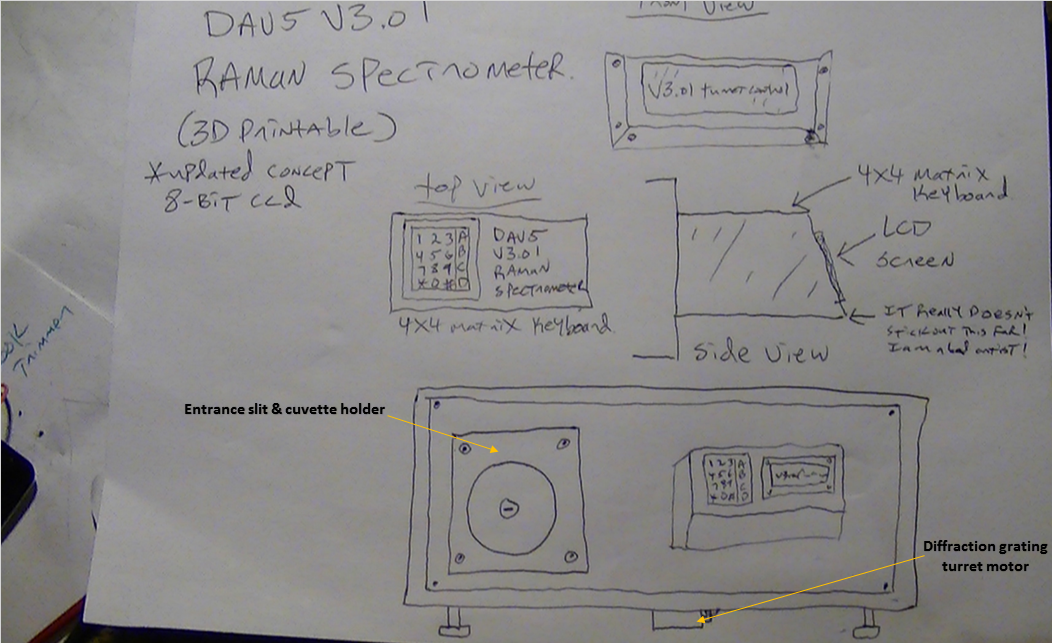 I will be using a 4x4 matrix keypad alongside a 20 x 4 (yellow display,) 12c LCD. This will not only control the triple turret stepper motor but will be interfaced with the CCD data capture software (I am getting a little better at C/C++ programming now, so I am feeling more confident.)
I will be using a 4x4 matrix keypad alongside a 20 x 4 (yellow display,) 12c LCD. This will not only control the triple turret stepper motor but will be interfaced with the CCD data capture software (I am getting a little better at C/C++ programming now, so I am feeling more confident.)
I hope those that read this post all the way through ( and not just "skim" the header,) will appreciate the simplicity that I have incorporated into the firmware for the turret control, because there are no external lib's needed other than the one for the LCD, and the stepper MTR control is stripped down to it's simplest functions, why? because what I found was, the most efficient method for using the controls that people have the most trouble with i.e,. Start/Stop CW/CCW Debouncing button controls ect.,
I have no debouncing code withing the control program because I have it in the hardware and it works with the momentary switches I use, besides, I tested 3 other prototype programs utilizing debouncing with PWM and all 3 failed, my guess perhaps too many "if" and "else" statements and not enough processing power in the Mega 2560 to handle the load (just my guess.)
When I stripped it all down to a basic framework and controlled the coils directly with a delay function everything sprang to life the way I imagined it. So if it ain't broke, I ain't gonna fix it!
Also I could not control the stepper MTR in the manner I wished using any type of stepper lib or with any type of PWM frequency manipulation, so instead of trying to re-invent the wheel, I just made everything simple :)
I hope I have explained my new concept enough for a clear understanding for what I am trying to accomplish, if not, please feel to discuss it with me constructive criticism is always a good thing and more people should engage in it. Your not going to hurt my feelings...Really :)
So please check out the video I posted the other day demonstrating the turret control program and it's new functions Updated...UniPolar Stepper Motor Controller Optimized
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.