 Loukas K.
Loukas K.Shortly after starting the project, I was already envisioning being able to control the robot in real-time via various input methods, one being a Web UI.
After figuring out one bug after the other, be it when turning in place, stepping sideways or walking circles, I started working out the details about how to implement such a Web UI. Thanks again to Daniel Berndt for helping me out with the HTML + JS implementation!
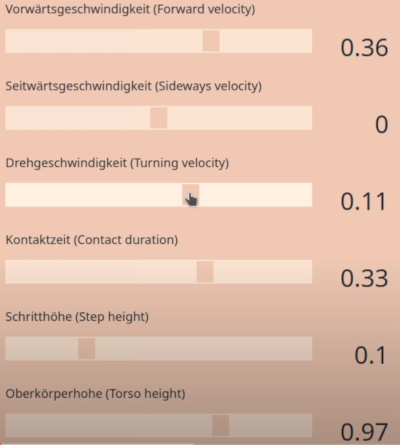
The basic idea is to have a VPS acting as a webserver for both user and robot. This VPS serves the website and syncs the slider values across clients, which was obviously important to prevent confusion. It also handles the WebRTC screen sharing, which I use to show a live view of the robot on the website.
The web UI clients communicate via a websocket and the VPS sends a number of desired states to the robot controller at regular intervals via multiple TCP sockets.
The controller parses those JSON objects using nlohmann/json and interpolates between desired value from web UI and internal reference states for the MPC to prevent abrupt value changes. Especially contact duration was incredibly sensitive to on-the-fly changes. This worked relatively well during first experiments even without the interpolation, the client side was the most time-demanding.
What happens when you give users a web UI to control a robot in a simulation, what's invevitably going to happen? Correct, someone is going to break it. Since the simulation is also quite sensitive, I spent a lot of time on a functional remote reset mechanism, i.e. being able to press a button in the web UI and having everything return to nominal. Unfortunately, the simulation really didn't like the various ways I had tried, numerical errors everywhere, leading the robot to explode without any other issues.
So I ended up using a janky way of killing simulation and controller, restarting both and moving the mouse to the "Start Screen Share Button" in the browser. I was under a lot of time pressure so forgive me for this solution :)
It was a lot of fun showing to family and friends, so definitely worth it!
Here is the related Github issue: https://github.com/LouKordos/walking_controller/issues/33
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.