 Apollo Timbers
Apollo TimbersHappy new year!
Yesterday day I worked on the omni directional drive a bit and got the steppers controller dip switches set properly and wired. I programmed the pi PICO with initial "get it working code" that interlaces the stepper command, so the motors move all at once. This program will not be the final as it does not take in input from higher level computer or have any safety features built in like loss of communication with main computer. The code is over on GitHub, if it is of use to you.
The drive unit G2 belts are slipping, this was going to be the case as the critical motor mount plate that is currently prototyped as a 3D printed part was designed to be a metal one.
I spoke to a local machinist and he is buying stock and waiting for me to send a drawing pack over. So in the next few weeks I should have the replacement aluminum parts.
A micropython program for the lower level pi PICO to test the omni direction drive of the platform. This is rough get it working code. The plan is to write up code that takes more of a
vector and magnitude commands from the higher controller (also make sure to have it stop and remove drive power if it does not receive a heartbeat from main computer as a safety feature)
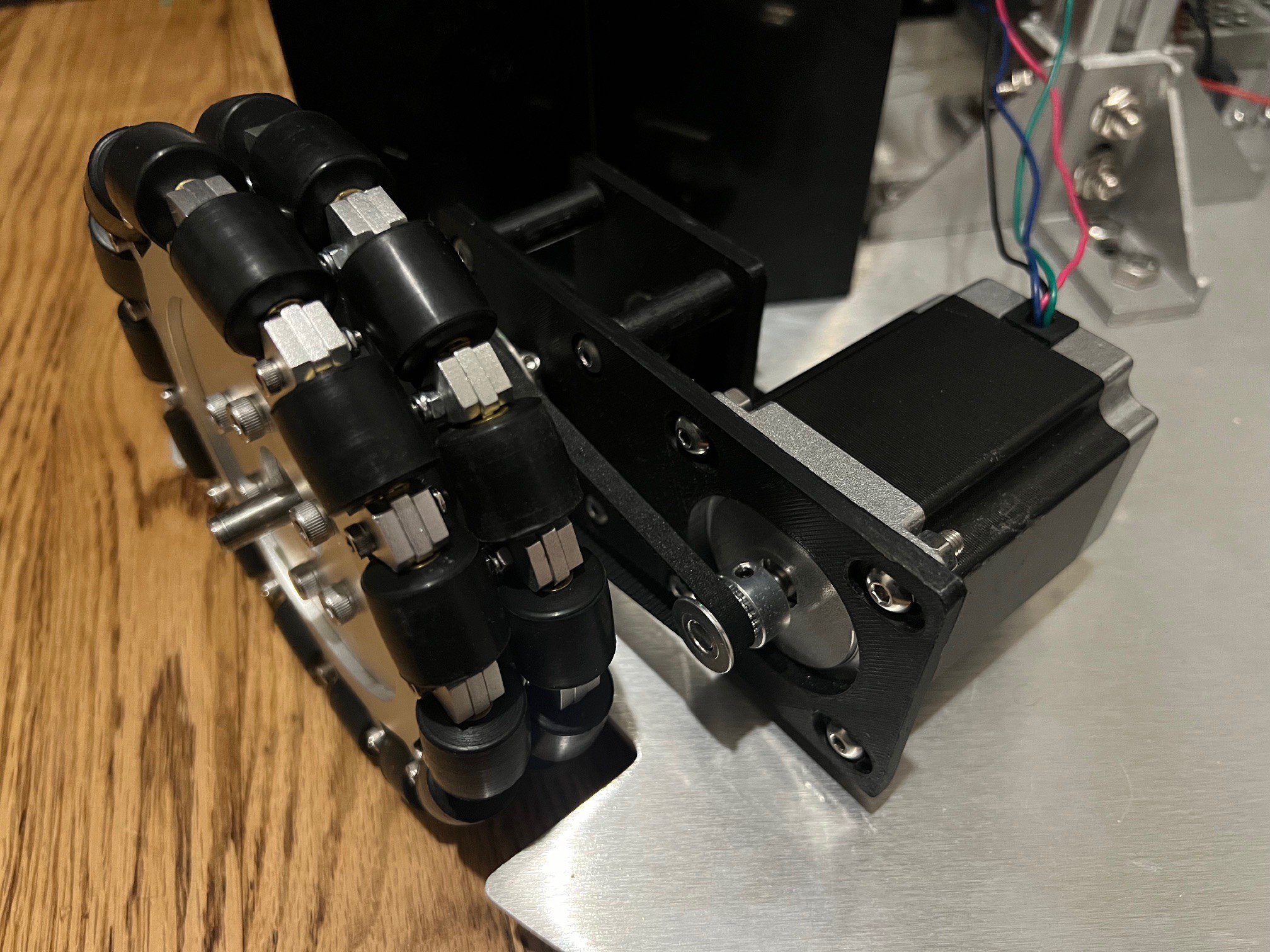
Below is a close up of a single drive unit. The weight of the robot is supported by two bearings per drive unit and the motor is free floating. The motor mount plate also features slots, so you can tighten the belts.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.