 Jacob David C Cunningham
Jacob David C Cunningham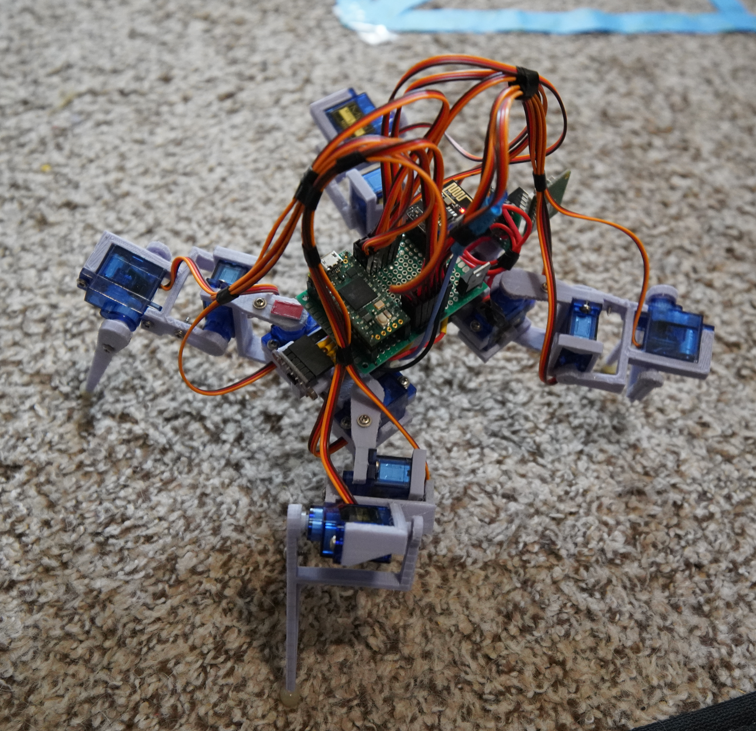
I have broken one of my own rules (ego posting), forgive me
At this point I have figured out the NED coordinate frame, what does this mean/how will I use it? Not sure yet but I can tell which way is down, there is that.
I've also been working with the gyro to determine the pitch and sweep angles. It is funny that the measured values went against what I assumed and I was able to prove that they were "correct" with an external check eg. video scenes and a CAD program.
I have to update some gaits/do more data collection. Then I have to put all of the code together. Then see how it tracks/loses accuracy in the real world.
Video below, audio is kind of weak I'm tired/can't be too loud where I'm at. I just recently uploaded it so the quality might not be good yet.
Oh I forgot to mention, the blue LED is for calibration, like if you're calibrating the magnetometer it will flash a few times to tell you to prepare then go solid as you rotate it about an axis (in XYZ order).
Next day thought:
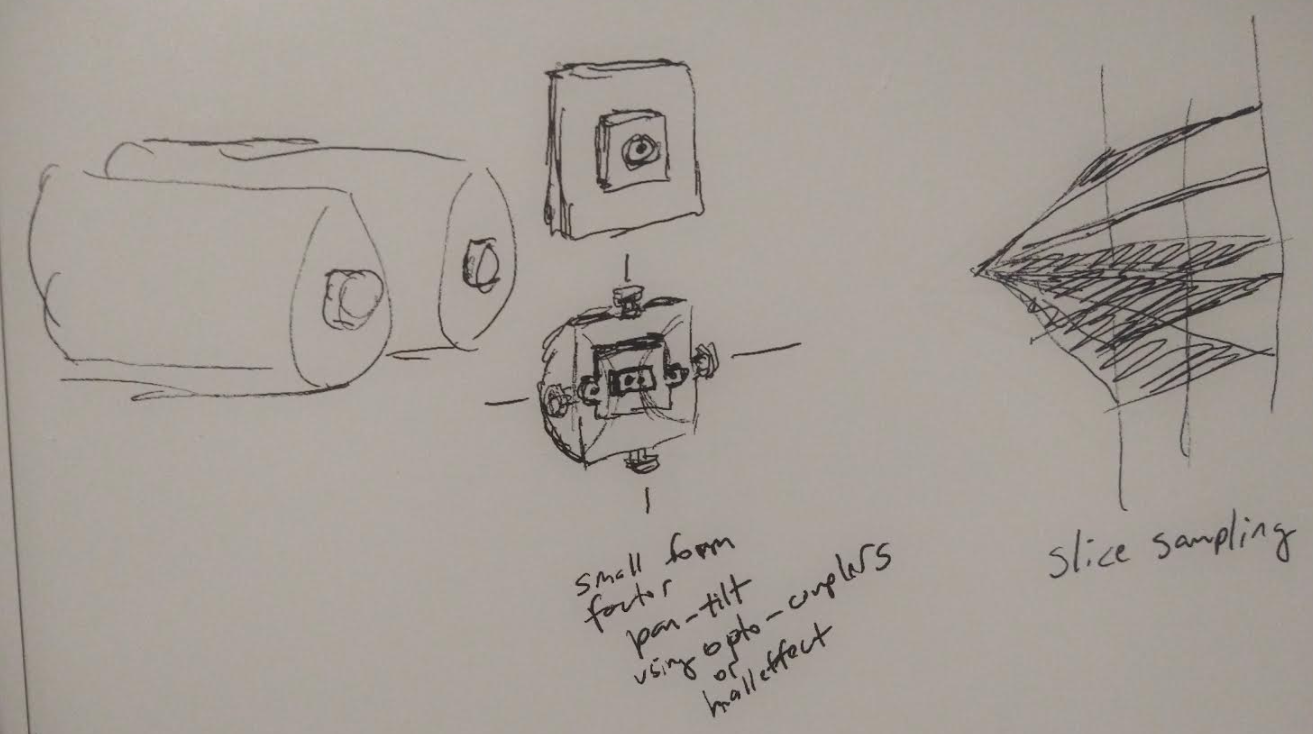
I do feel regretful with this design, mostly because of oversight like the ToF sensor needing 20ms to get a sample. It just means the servos are stuck in high-torque situations longer... the yellow area above is like an ideal scenario but really I'm working with slices. The more tilt samples I do the better data I have.
Anyway I have a Pi Zero 2 and the data streaming stuff for the world telemetry will be much better.
I'll think about how a small form-factor pan-tilt system with some kind of encoder setup to tell where it is with small servos. I'll also use a 2-cell setup as that seems to be more standard vs. stepping up from a single cell. I also want to find stronger servos vs. these cheap 9G servos that are weak/easy to strip.
Oh yeah not pictured below but you would need to use a slip ring for the sensor to move freely. It would need the 4 lines (VCC, GND, SCL, SDA) to use the ToF sensor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.