 deʃhipu
deʃhipuI had this cirque touchpad thingy lying in my drawer for years now, planning to add it to the keyboard, but I never really had the time to look into it. It doesn't help that the way you interface with it is by using an FPC ribbon cable, so you have to find the correct cable and connector. And then you have to write the code to actually make it work. Turns out, once all the pcbs and parts arrive, you can do it in a weekend.

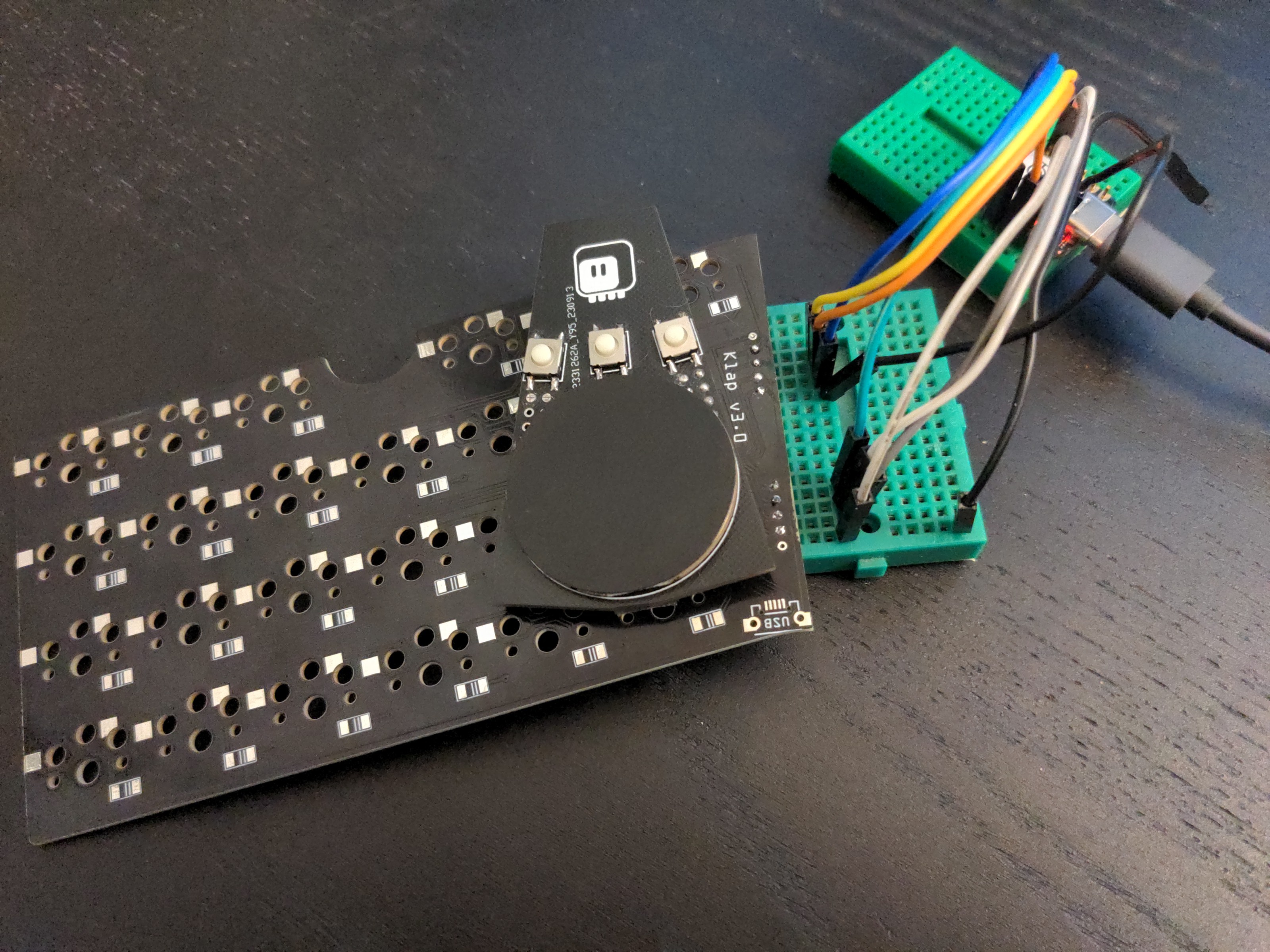
The PCB is pretty basic, it's just the FPC connector and a pin header for plugging into the spare GPIO pins on my keyboard, together with three buttons for the mouse buttons. I made the hole for the fpc ribbon excessively large, just to be safe, but of course it doesn't matter, because it's covered by the touchpad anyways.

I connected both the SPI and I2C pins, because I didn't know which mode will be best, but that left me one pin short, so I connected the CS pin to GND permanently, since the touchpad is going to be the only thing on the bus. This might by why I couldn't get the SPI mode to work, in retrospect. I also forgot to add the pull-up resistors on the I2C lines, but that was fortunately easily bodged.
To work on the code more comfortably, without having to use a second keyboard, I made a debugging rig out of a spare half of a keyboard PCB.
I used Adafruit Cirque Pinnacle CircuitPython library as the starting point, but it turned out to be way too big to fit on the tiny SAMD21 chip I'm using on my keyboard, so I had to write a minimal version. It goes like this:
from micropython import const
import time
from adafruit_bus_device.i2c_device import I2CDevice
_STATUS = const(0x02)
_SYS_CONFIG = const(0x03)
_FEED_CONFIG_1 = const(0x04)
_FEED_CONFIG_2 = const(0x05)
_Z_IDLE = const(0x0A)
_PACKET_BYTE_0 = const(0x12)
_CAL_CONFIG = const(0x07)
class Trackpad:
def __init__(self, i2c, address=0x2a):
self._i2c = I2CDevice(i2c, address)
self._write(_Z_IDLE, b'\x1e') # 30 idle packets
# config data mode, power, etc
self._write(_SYS_CONFIG, b'\x00\x00\x00')
while self.available():
self.clear()
# calibrate
self._write(_CAL_CONFIG, b'\x1f')
timeout = time.monotonic() + 1
while not self.available():
if time.monotonic() > timeout:
break
self.clear()
# rel mode config
self._write(_FEED_CONFIG_2, b'\x11')
# intellimouse
with self._i2c as i2c:
i2c.write(b'\xf3\xc8\xf3\x64\xf3\x50')
# feed enable
self._write(_FEED_CONFIG_1, b'\x01')
def available(self):
flags = self._read(_STATUS)[0]
return bool(flags & 0x0c)
def read(self):
data = self._read(_PACKET_BYTE_0, 4)
self.clear(False)
return data
def clear(self, post_delay=True):
self._write(_STATUS, b'\x00')
if post_delay:
time.sleep(0.00005) # per official examples from Cirque
def _read(self, reg, count=1):
buf = bytearray(count)
buf[0] = reg | 0xa0
with self._i2c as i2c:
i2c.write_then_readinto(buf, buf, out_end=1, in_end=count)
return buf
def _write(self, reg, values):
buf = bytearray(len(values) * 2)
for index, byte in enumerate(values):
buf[index * 2] = (reg + index) | 0x80
buf[index * 2 + 1] = byte
with self._i2c as i2c:
i2c.write(buf)
Then I had to just connect it to the uKeeb library I'm using, like this:
class Keeb(ukeeb.Keeb):
def __init__(self, *args, **kwargs):
super().__init__(*args, **kwargs)
try:
i2c = busio.I2C(pin.PA09, pin.PA08)
i2c.try_lock()
i2c.scan()
i2c.unlock()
except RuntimeError:
self.trackpad = None
return
for device in usb_hid.devices:
if device.usage == 0x02 and device.usage_page == 0x01:
break
else:
return
self.mouse_device = device
self.trackpad = trackpad.Trackpad(i2c)
def animate(self):
if self.trackpad is None:
return
while self.trackpad.available():
data = self.trackpad.read()
data[0] &= 0x07
data[1] ^= 0xff
self.mouse_device.send_report(data)
Note that I added fallback code – if the shield is not connected, the keyboard still works, without the touchpad.
Overall, it's much simpler than I expected and works very well. I might make another version of the shield, with the i2c resistors, a jumper to use one of the i2c as cs when in spi mode, and rearranged mouse buttons (right now the middle button is the left mouse button, which may be a bit confusing), but we will see.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.