 kelvinA
kelvinA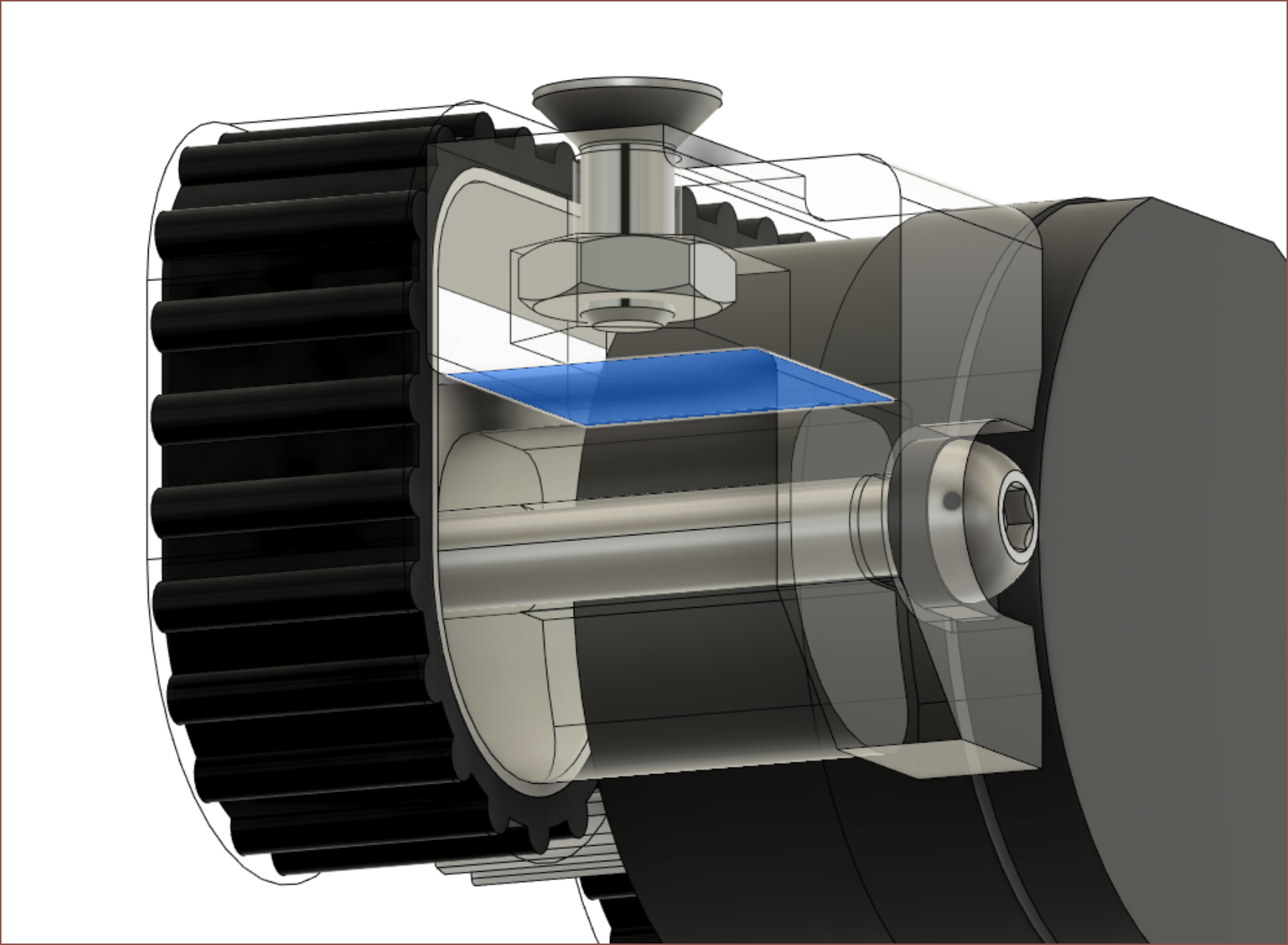 There actually isn't that much space at all for the strain sensors. The smallest that will fit in the new space I've provided (blue face) is the one below, which comes in at 6x7mm:
There actually isn't that much space at all for the strain sensors. The smallest that will fit in the new space I've provided (blue face) is the one below, which comes in at 6x7mm: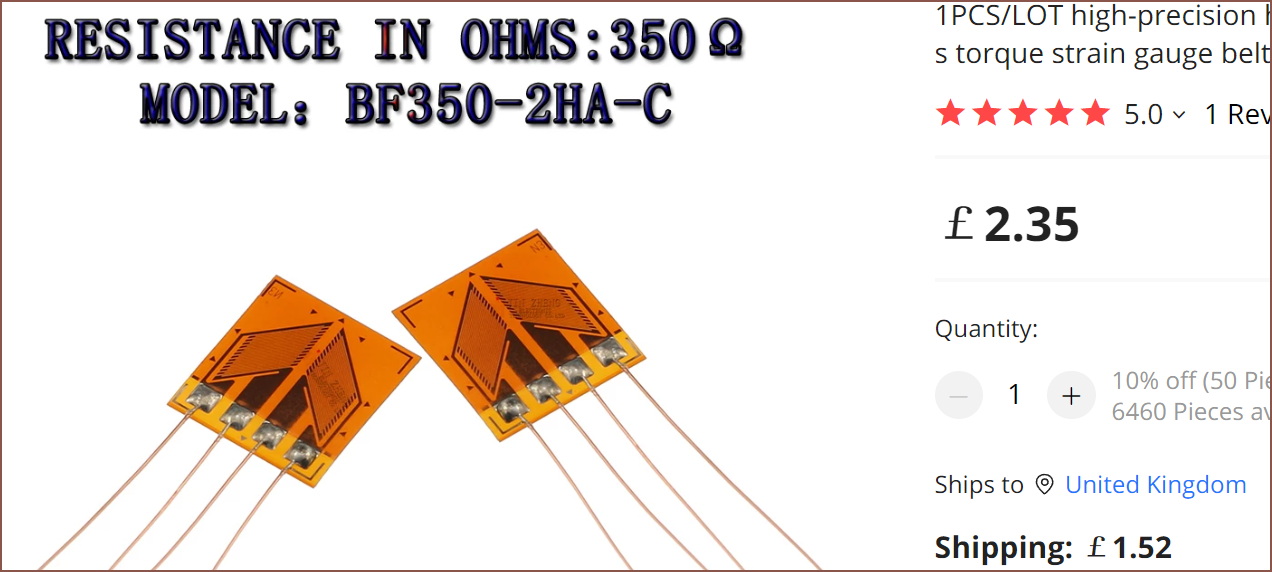 It's questionable if the part would even flex in a usable way, since I fear that the 3mm section will bend an unacceptable amount. Ideally, I want to sense up to 240g of force. Fusion360's simulation keeps giving me an unknown failure message so I can't get any data that way.
It's questionable if the part would even flex in a usable way, since I fear that the 3mm section will bend an unacceptable amount. Ideally, I want to sense up to 240g of force. Fusion360's simulation keeps giving me an unknown failure message so I can't get any data that way.
While small, it does seem to be perfectly FDM printable. I'm printing it out now.
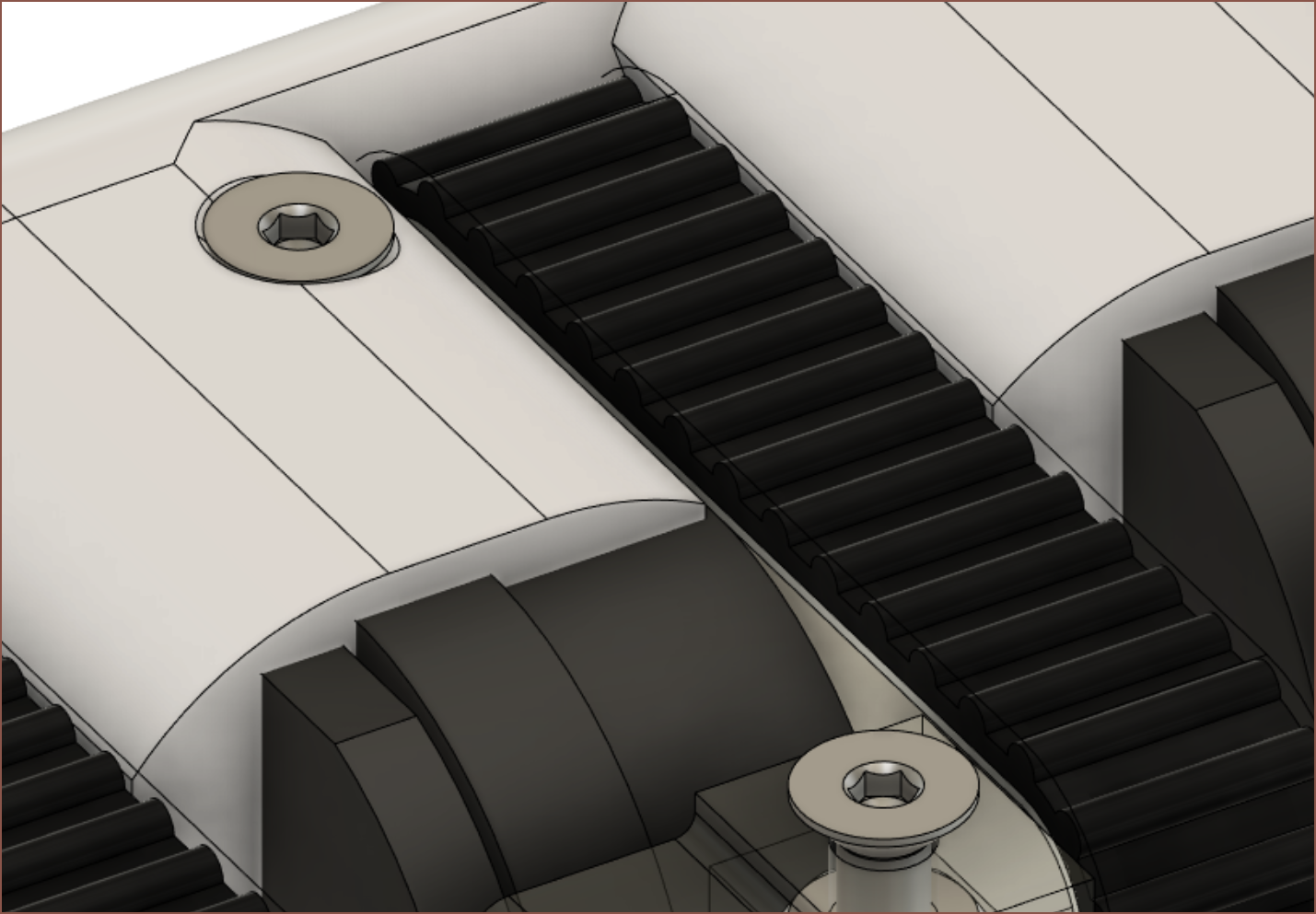
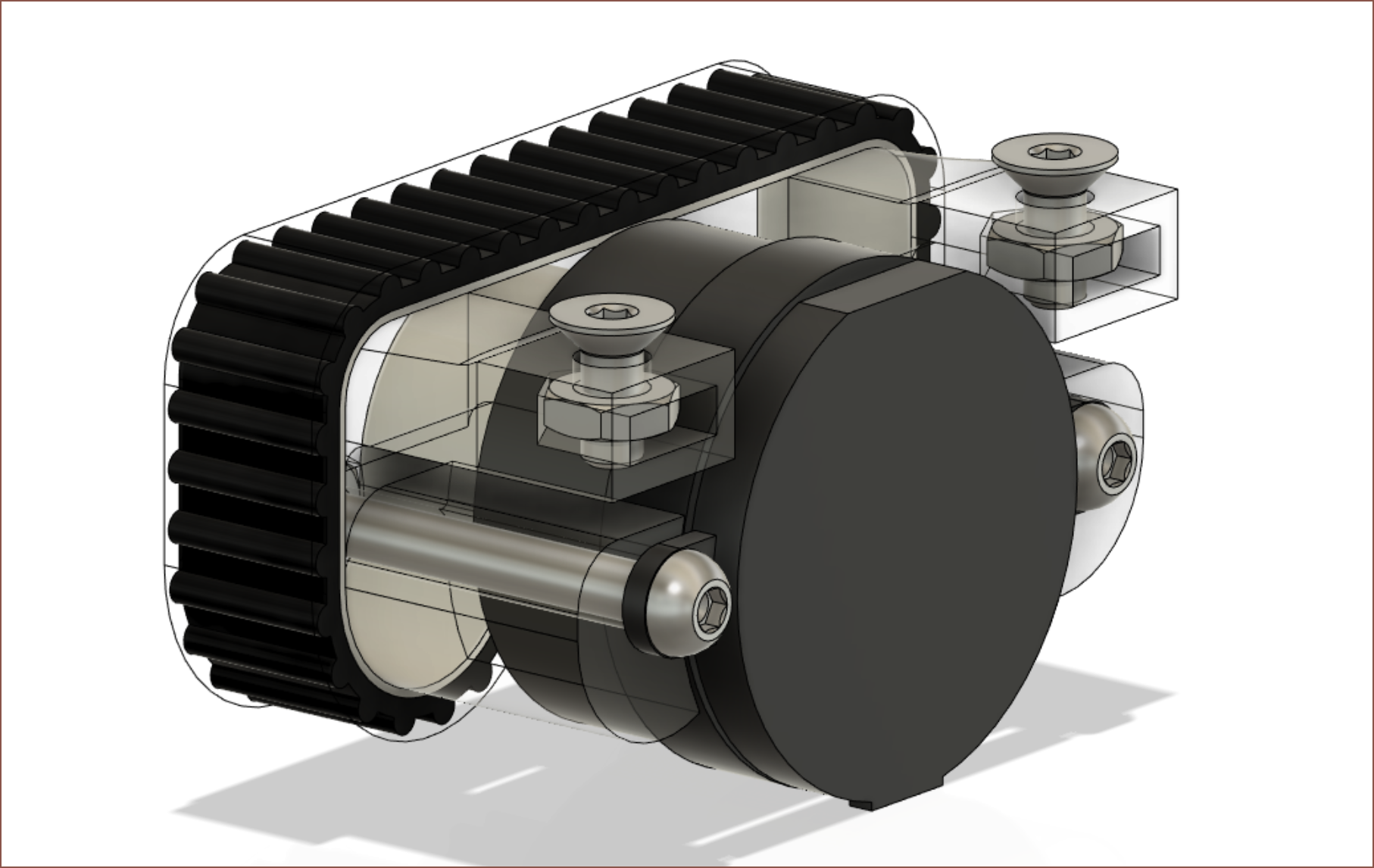
I might "mirror" this idea because the M2 countersunk screws are now right next to the belt:
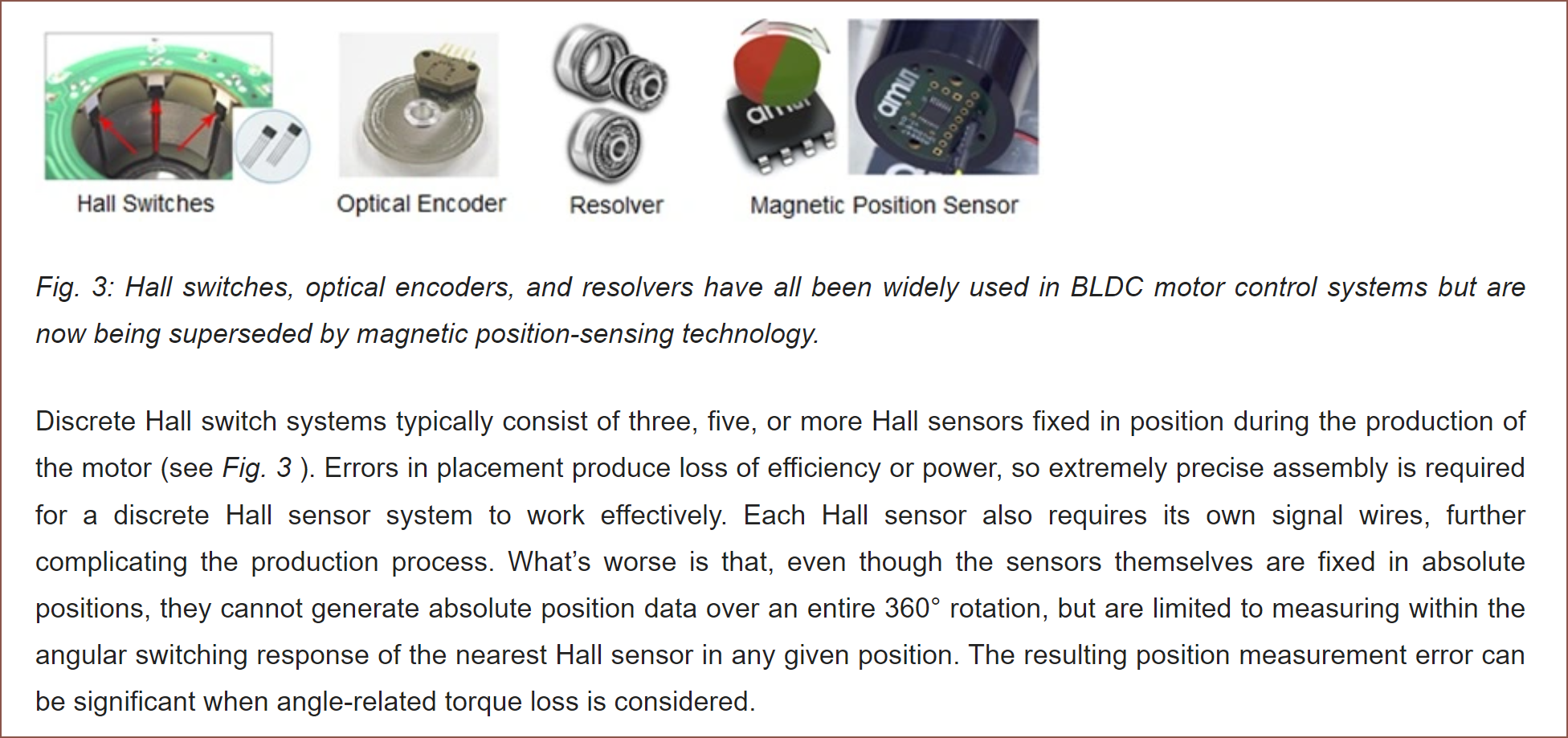
In other news, it looks like I'm going to have to abandon the idea of using 2 hall effect sensors instead of an absolute magnetic encoder due to this research I found.
I've also been looking at my options instead of the TMC6300. The only reason why I started looking around was because of the tiny 3x3mm package, but it seems that I can just fry the board on a pan of sand:
Anyway, a more important reason to look for alternatives is because my human eye can only see Out Of Stock for the TMC6300-LA and the DRV8311 from Ti I also found. The STSPIN230 looks to be an option. While it's still in the same 3x3mm package, I can get it on alixpress for under £3 a chip.
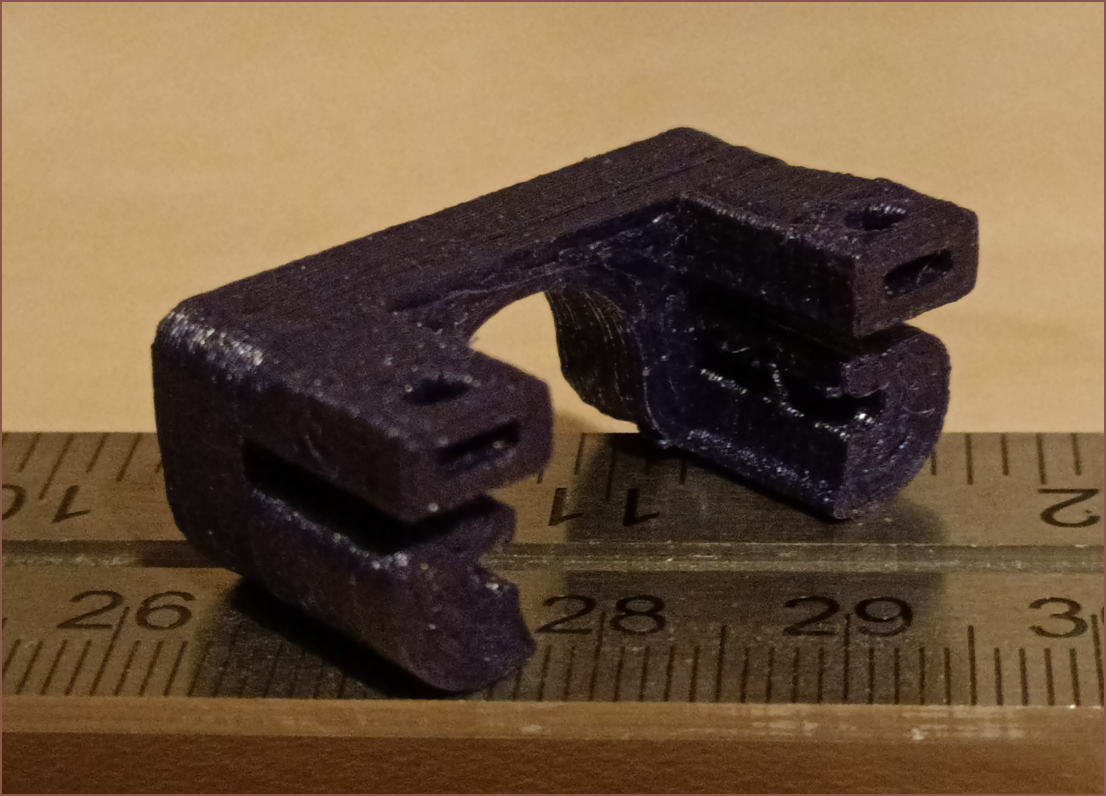
Oh, nice the print is done.
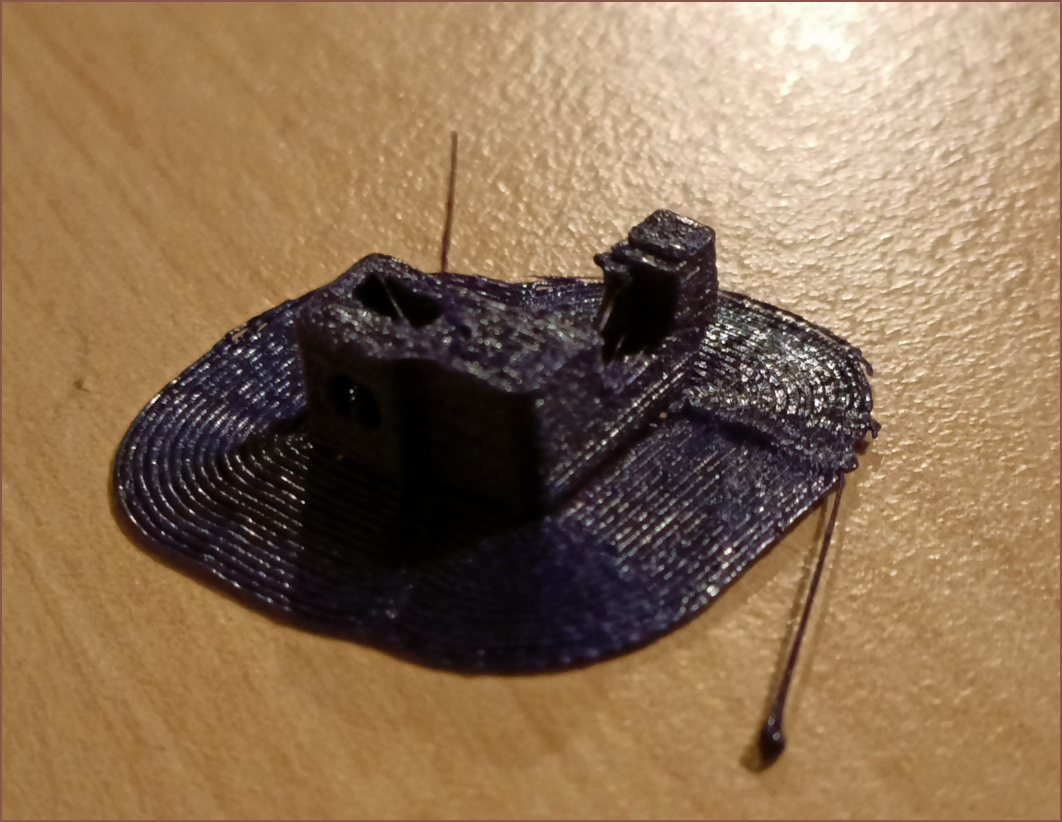 The PLA is quite a bit stiffer than I expected, so perhaps this will work fine. That or it doesn't flex at all and most of the bending is exerted through the top plate of the switches. PETG should be around about 2/3 the stiffness of PLA.
The PLA is quite a bit stiffer than I expected, so perhaps this will work fine. That or it doesn't flex at all and most of the bending is exerted through the top plate of the switches. PETG should be around about 2/3 the stiffness of PLA.Hm... wait couldn't I just...
[some minutes later]
Yeah. Now everything's 1 piece not 3 and I've now got 6x10mm of area for the strain guages, which increases my options a bit. It seems that a 7mm wide area would be ideal though, which would require me to increase the overall key length to 34mm.
CheckingTool: - Length increased - Keycap_Flat length increased from 24 to 26mm. - File repaired - Belt length: 97.58mm - Recommendation: Reduce belt length to 96.5mm to use a 96mm belt. - Implemented changes to Tetent [gd0090] concept without conflicts. -- The new length (106mm) does not propose a conflict in Teti [gd0022]. - The changes can be implemented into Tetent Timespy [gd0136] without expected conflicts. - The increased length of the Tetrinsic Switch [gd0041] is expected to increase ergonomics for larger hands.
Ok everything checks out it seems.
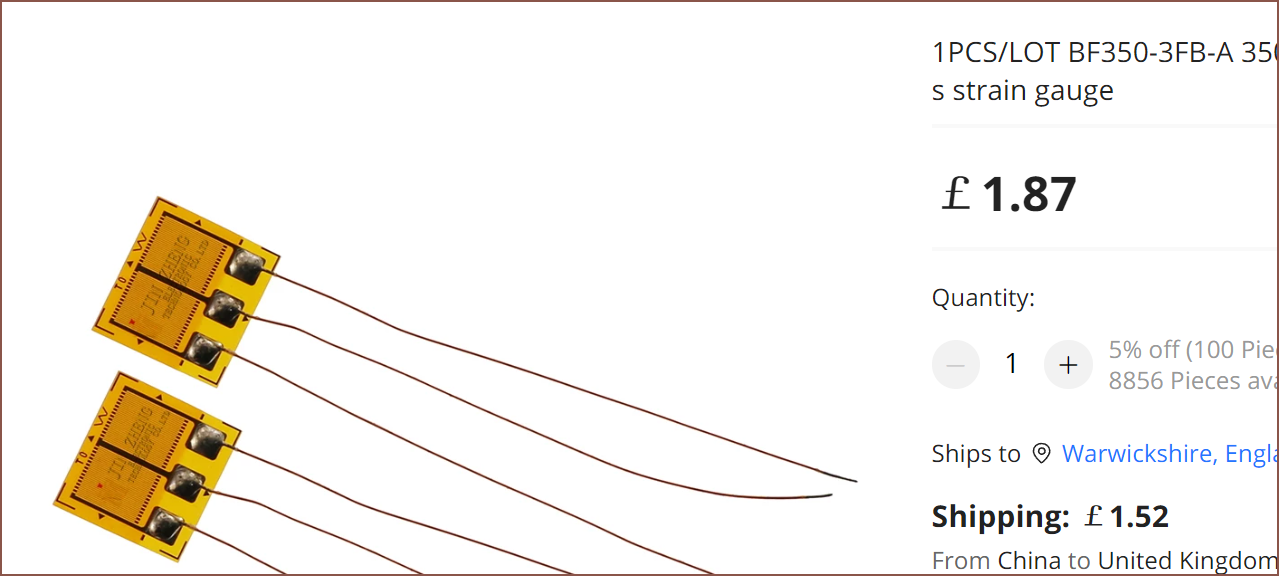 This one barely fits, but now I'm realising that these are some expensive strain guages. Here are some 7.1x4.5mm strain guages for a fraction of the price:
This one barely fits, but now I'm realising that these are some expensive strain guages. Here are some 7.1x4.5mm strain guages for a fraction of the price: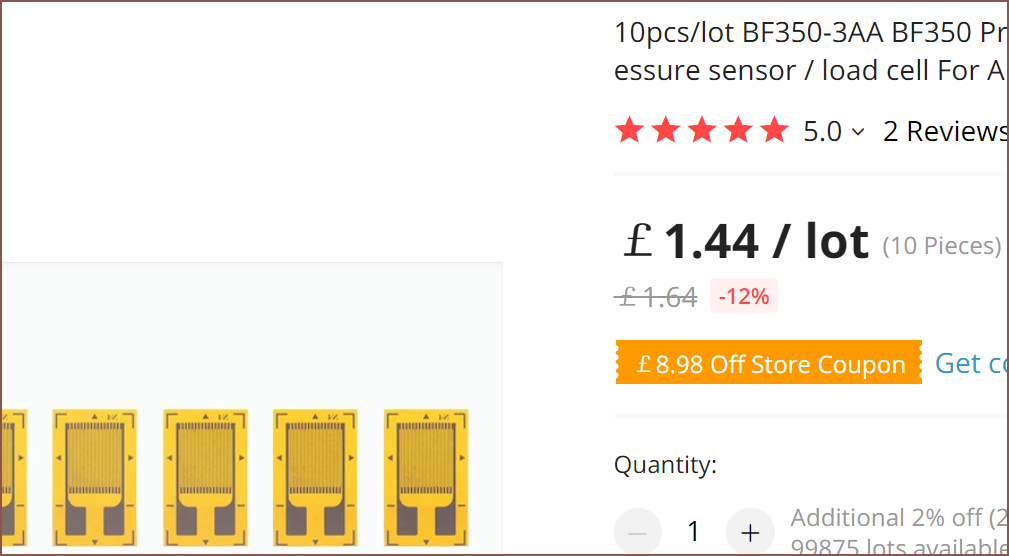
[Some research later]
Ok I've read https://www.allaboutcircuits.com/textbook/direct-current/chpt-9/strain-gauges/ and, with the way I'm straining the key, I only need 2 mounted in the area. The other two need to be nearby to account for temperature differences. Ideally, I'd have whatever sensor's in this:
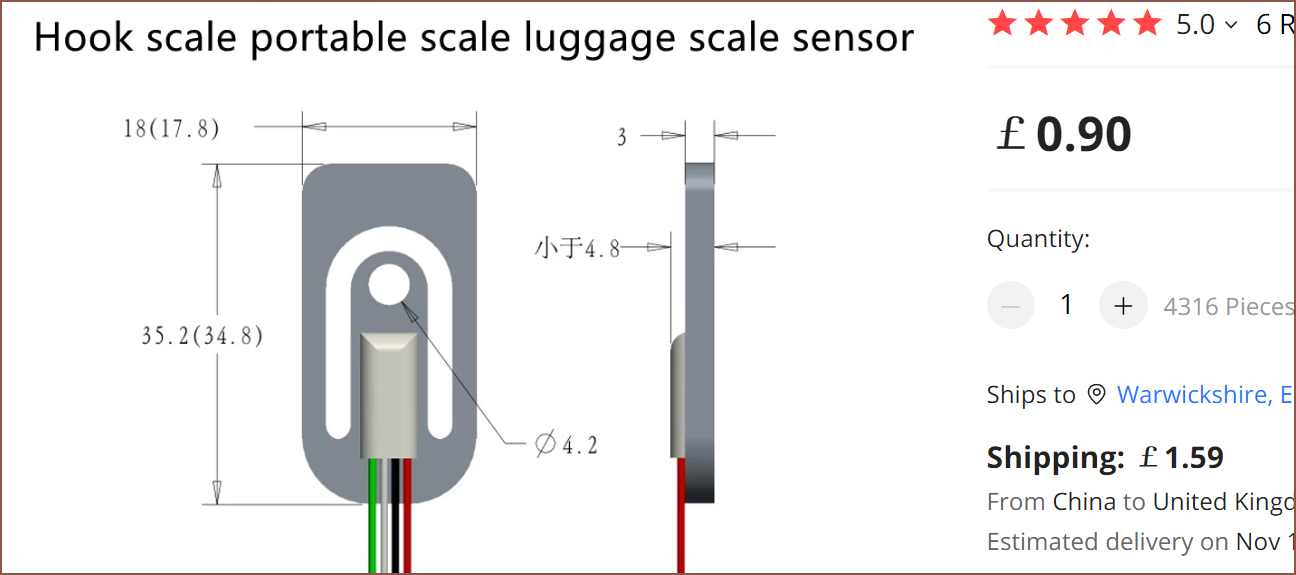 Considering I need to accurately sense grams of force and not just when someone has pressed hard enough, I'm more inclined to go with the more expensive but full-bridge circuit.
Considering I need to accurately sense grams of force and not just when someone has pressed hard enough, I'm more inclined to go with the more expensive but full-bridge circuit. The issue is that the only ones I can find start at 8mm width.
The issue is that the only ones I can find start at 8mm width.[some more research later]
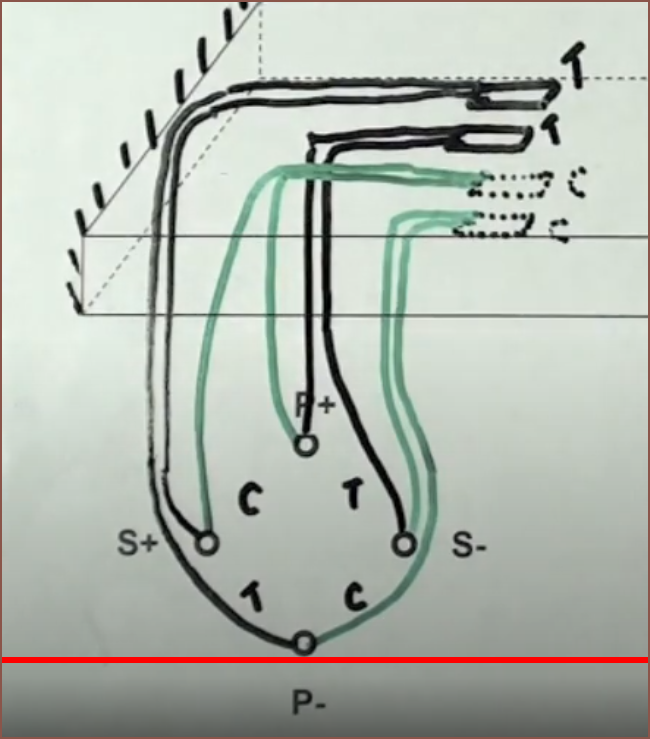
Right... I could stick the green strain guages to each of the two beams and have the other two somewhere else that doesn't flex.
 okay... I don't think I have enough space for that. At least I now know what the shape is for.
okay... I don't think I have enough space for that. At least I now know what the shape is for.Second print
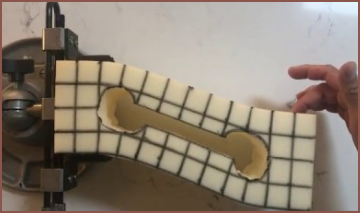
 Ok I've printed the keycap and tried to put a GT2 belt over it. I'm now going back to the 24mm keycap-flat length so that I can get a larger radius on the edges. I've also been able to try out friction of the belt on plain PLA. It's much more resistant than fingernails, but feels much more consistent when transitioning from fingernail to fingertip. The GT2 gives a dependable grip to my fingers that I've only somewhat experienced on the PSVITA 1000 joysticks. I have a feeling that sticking the slippery tape on the back of the belt would reduce friction more than sticking it onto the print, but I don't know about its longevity if I did that.
Ok I've printed the keycap and tried to put a GT2 belt over it. I'm now going back to the 24mm keycap-flat length so that I can get a larger radius on the edges. I've also been able to try out friction of the belt on plain PLA. It's much more resistant than fingernails, but feels much more consistent when transitioning from fingernail to fingertip. The GT2 gives a dependable grip to my fingers that I've only somewhat experienced on the PSVITA 1000 joysticks. I have a feeling that sticking the slippery tape on the back of the belt would reduce friction more than sticking it onto the print, but I don't know about its longevity if I did that.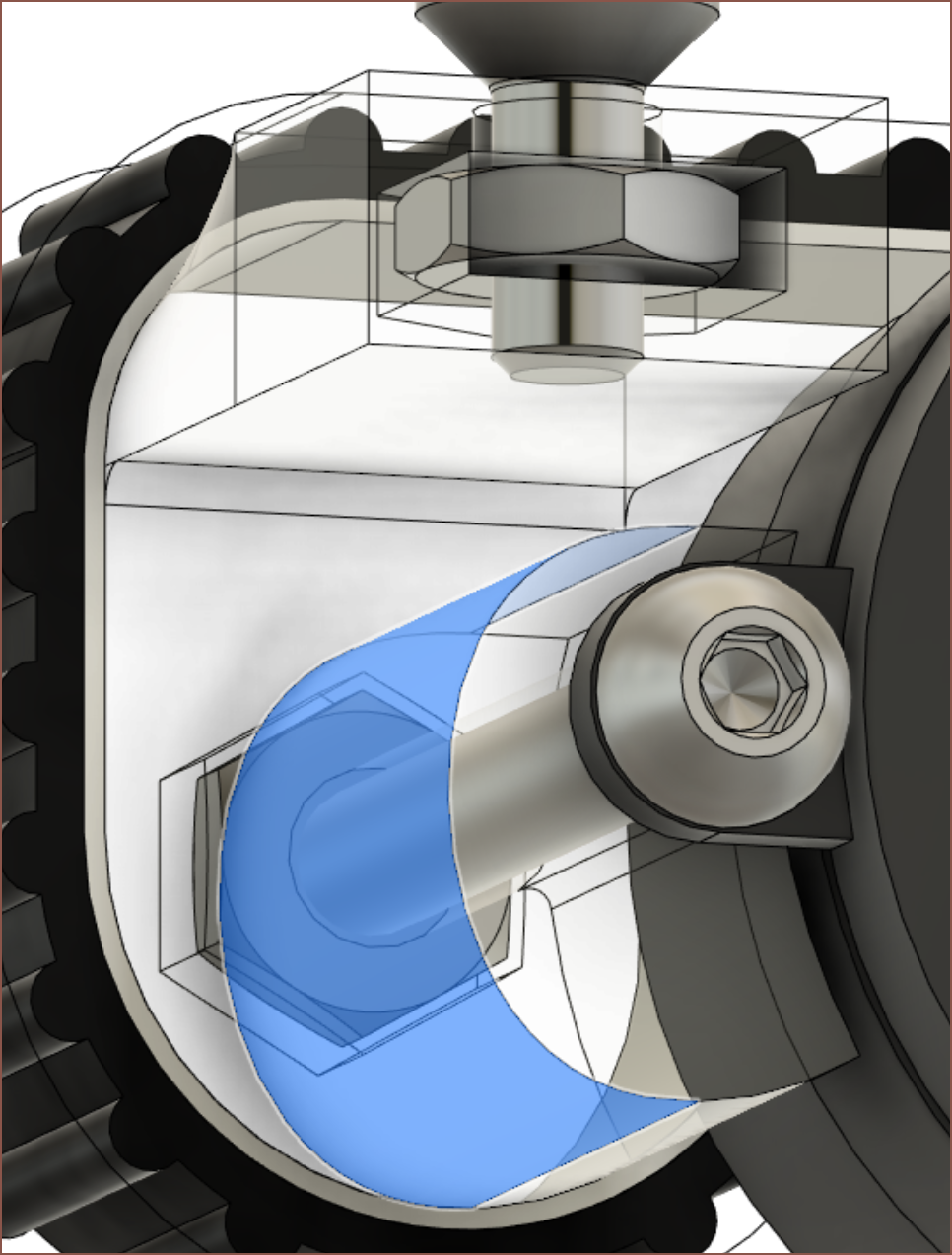 I've pulled back this face for easier accessiblility to the strain guage mounting location. This face is also where the other two strain guages will likely be placed.
I've pulled back this face for easier accessiblility to the strain guage mounting location. This face is also where the other two strain guages will likely be placed.[after more research]
The absolute encoder situation is looking a lot less favourable. With a 1.2mm PCB, the length is worryingly close to the 20mm limit. I was hoping that I was going to get under 19mm for the #Tetent Timespy [gd0136].
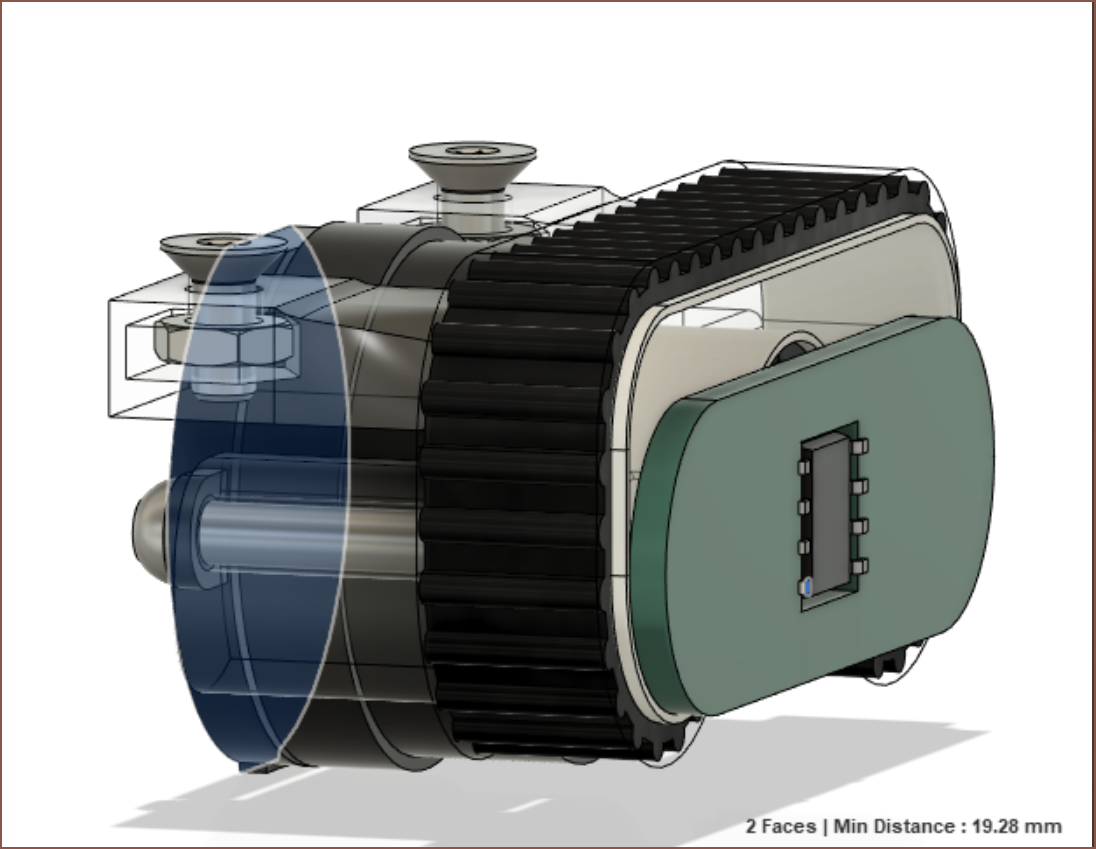 Yes. This is with a hole cut for the AS5600 to save on space.
Yes. This is with a hole cut for the AS5600 to save on space.Anyway, I started writing this project log at 16:00 and it's currently 23:00 so I think I should stop here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Wow. To think that Me In The Past knew about the DRV8311 but I couldn't go for it at the time because it was out of stock...
Are you sure? yes | no