 kelvinA
kelvinAMy fingers are my client; at least, that's how I should consider this development process if I was some freelancer. I make a solution. I give it to the "test group". The test group hates it because I didn't really listen to them.
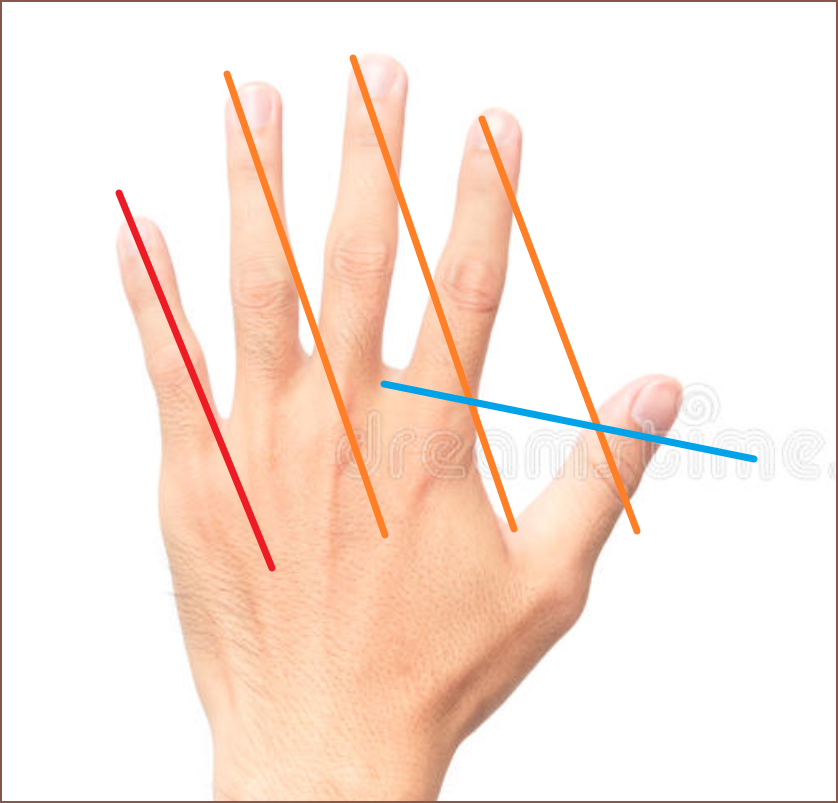
Finger5 is most likely to fail the entire solution, followed by 1, 4, 2 and lastly 3. This is because Finger5 needs the most accomodation.
The thickness that matters is the distance between the top of the ball-chain and the bottom of the assembly. I don't want to take Finger5 out of the equation though, because Thumb1/Finger1 has the force, speed and dexterity to actually offer 4 character chording. I'm not thinking of constantly inputting 8 characters at a time, but 4 on a single hand will be very beneficial. Remember that when this project started, I was expecting to get 4 characters out of both hands.
I've also determined that the most comfortable angle (for all but Finger1) is determined by Finger5 and is the same angle for all. It seems to be 4 or 5 degrees in the direction of Finger5 and not away from it, as I've done in #Tetent TimerSpy [gd0136].
I've thought of a concept already that could obtain this solution, where you have one side that has the tall, 20mm-ish block that has the electronics and then a thin section where the ball track. Again, this strain guage (or other pressure sensing method) is an unsolved question mark. The track would likely have to be bolt reinforced so that the part furthest from the strain sensors don't bend, reducing the accuracy of the readings.
Part of the thinness is also because the Finger1 actually intersects the other ones, mainly Finger2. This will allow parts of the track to go under others like some kind of micro overpass bridge.
I also feel like this could still be used as a VR controller of sorts. Sure all fingers would be locked into a single plane, but you could still probably get half the way to the sensation of force feedback gloves. It's not designed for that, but with the expected price tag of a single Tetrinsic, and development into AR with #T^2 TyMist [gd0138], I'd like to cover as much of a solution as possible. Everything after learning and typing fast is a free bonus.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.