 kelvinA
kelvinA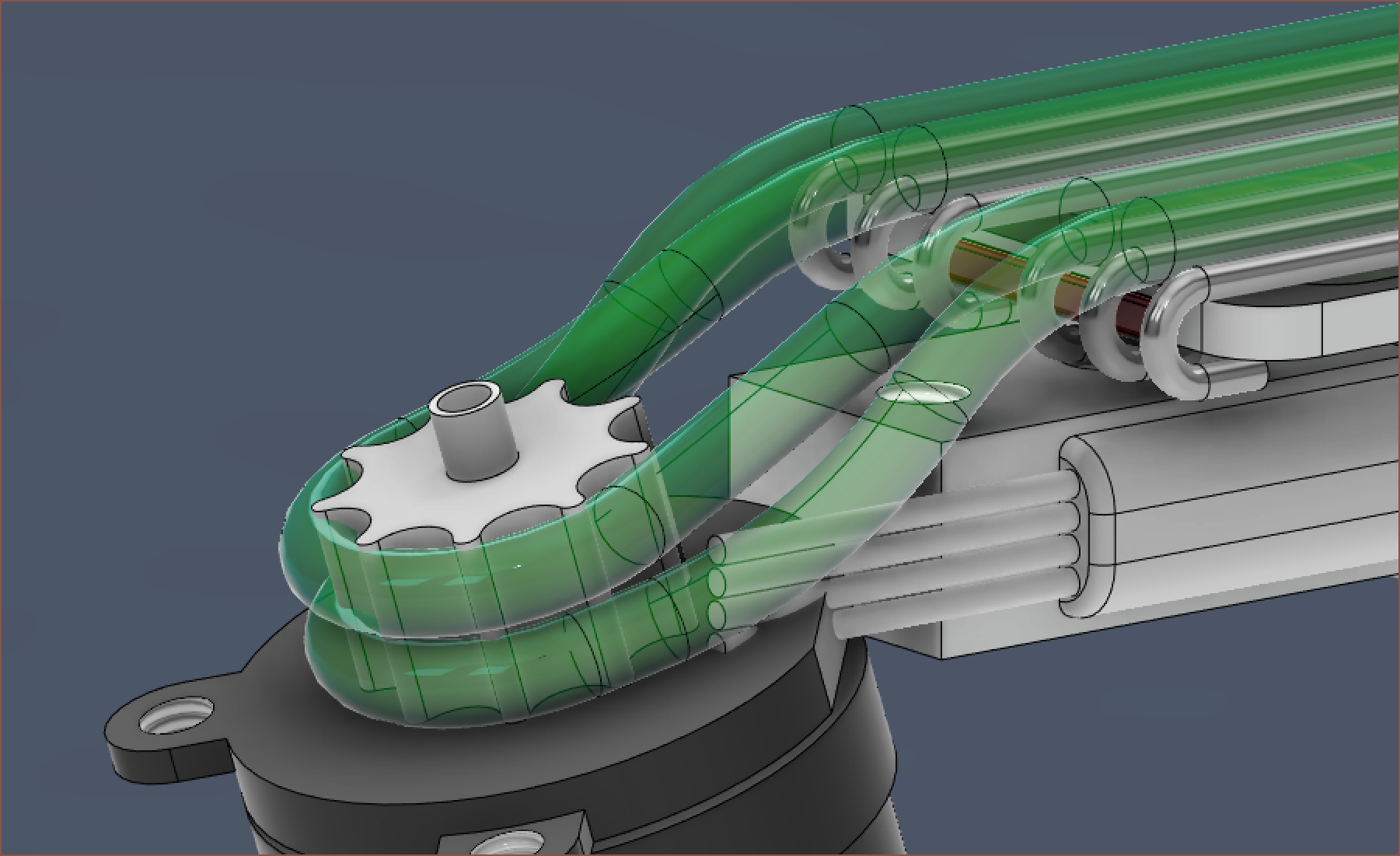
After all this time, I've finally managed to model the full 3D pathways of the chain. I've added a cap onto the printed pulley (not imaged) with the expectation that I'd insert a grub screw. To model the paths, I used the intersection of 2 extruded surfaces to obtain a sweep path:
I'm using the 2x10mm steel tubes for the pulley and the 2 bearings by going with MR72ZZ bearings that have an inner diameter of 2mm instead of 3mm. I can also get 30pcs 2x10mm tubes for the same price as 20pcs 2x8mm tubes from a different seller, and I need 24 tubes for 1 Tetent.
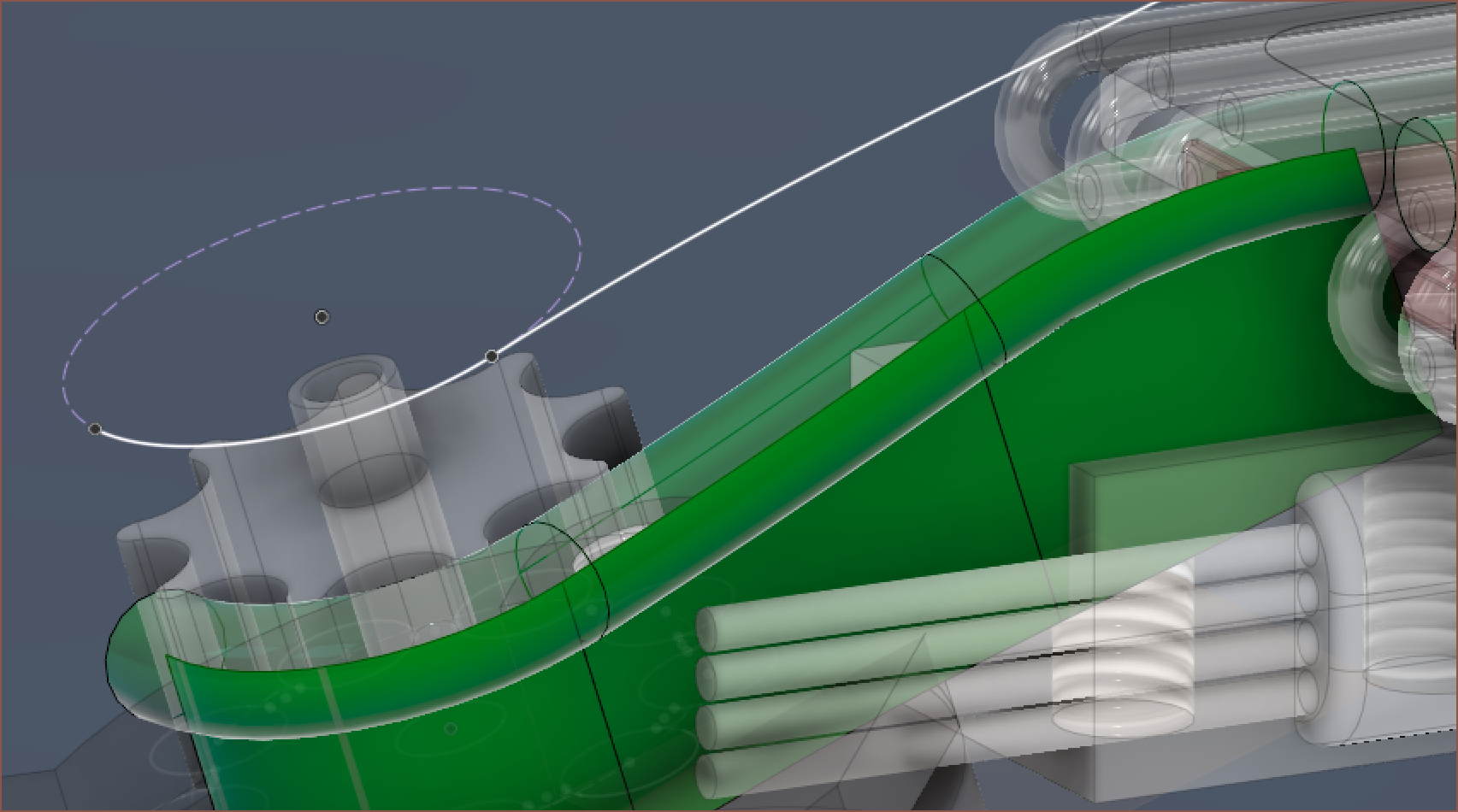
I've also decided to go with a continuous 1mm sliding tube design, putting one of the bends where the LCD wire is so that sharp cutoffs don't risk damaging it:
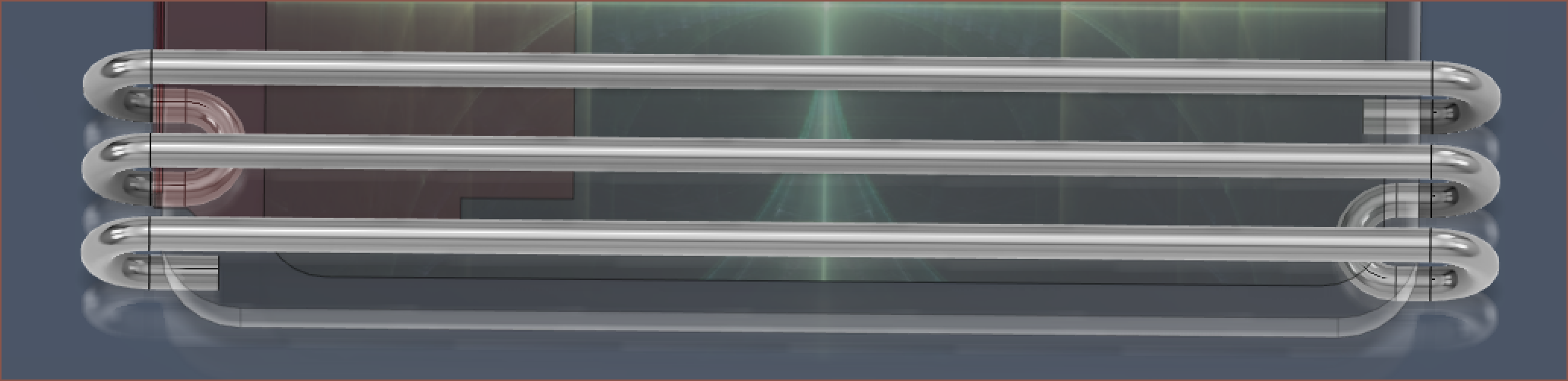
I've edited the spacings so that all bends are the same inner diameter of 1.7mm. The ball-chain now hovers 1/3 of a millimetre above the LCD. I just hope that 1mm is stiff enough for this job, and I may have to look into simulation in the near future to confirm this.
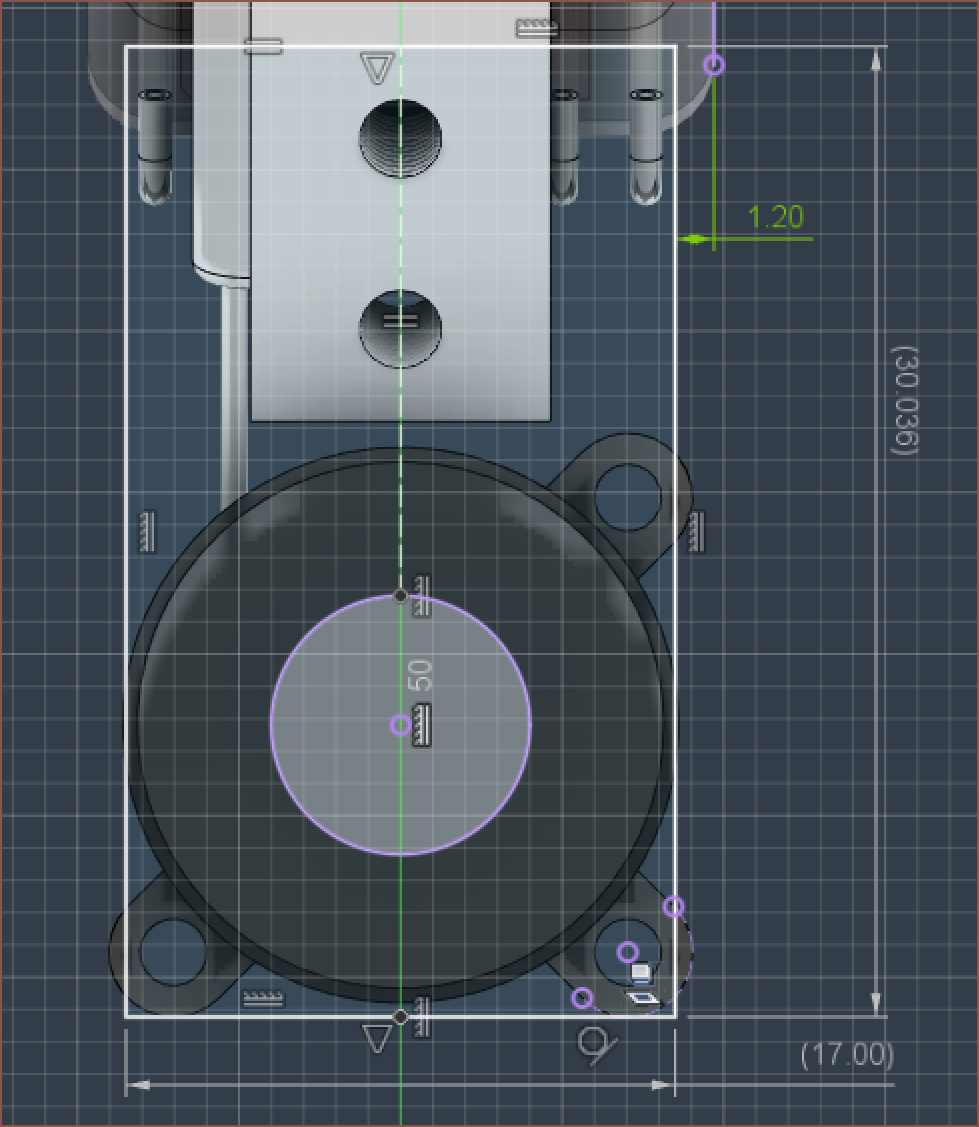
I've created a sketch that will be the basis of the PCB, and it turns out that it's essentially the predicted 17 x 30mm size:
I do worry about the amount of time sunk into this project (+ Tetent) though. I feel like a shareholder when I tell myself "This isn't WeWork! We need to turn a (time)-profit eventually!".
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.