 Christoph
ChristophI have made two layouts, one for 2 layer PCBs and one with 4 layers. There's not a huge difference, but power supply is a bit better with 4 layers.
Here's a 3D view:
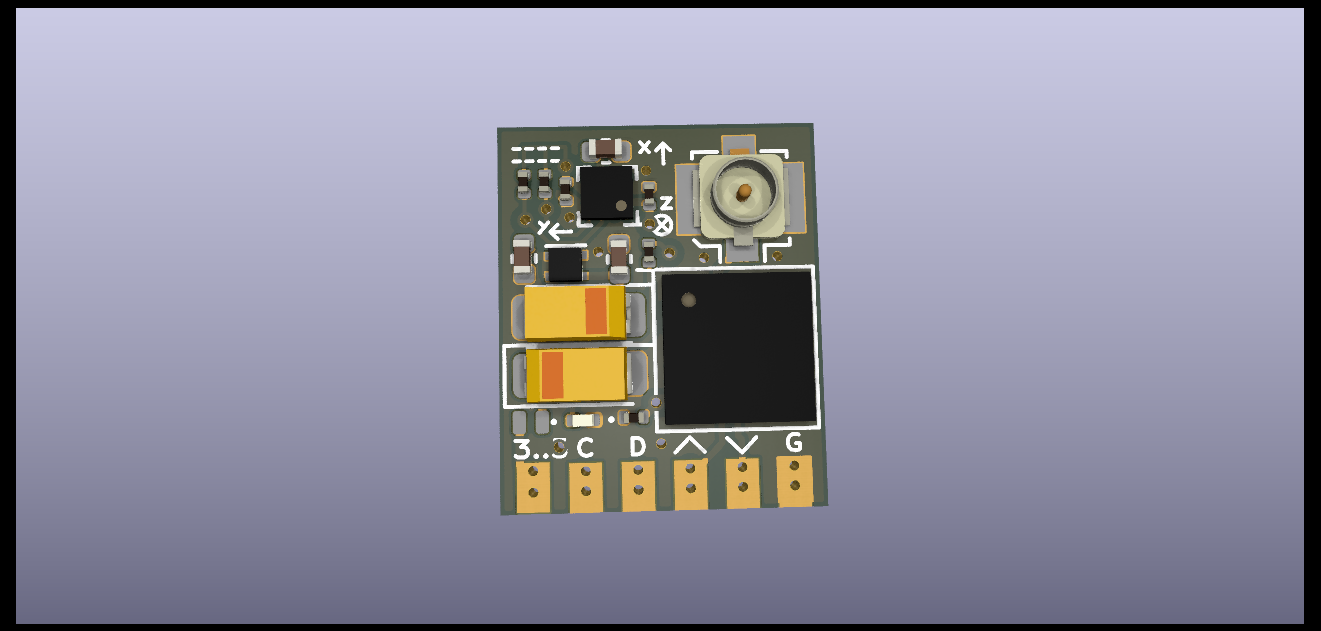
The schematic is pretty simple since the design is pretty much just a breakout board for the two chips (power supply, magnetometer with I2C and pull-ups, GNSS with UART), so I'll leave that out for now. It will be included in a repo later on.
The I2C pull-ups are in the top left corner and can be disabled with a sharp knife, between the two dashed lines.
The chips operate at 3.3V nominal and the NCP160 regulator can provide these from a 5V rail. However, since the NCP160's dropout voltage is extremely low, the supply can even come from a 3V3 rail and nobody would notice. There was even enough space for a reverse polarity protection diode.
An LED was added to indicate that a fix was found (ZOE-M8Q's timepulse output).
The passives are 1206 (tantalum caps), 0402 (caps) or 0201 (resistors and caps). I have 7 of the GNSS chips around so that's the number of boards I plan to assemble (with low temp paste, see here: https://hackaday.io/page/10792-assembling-densely-populated-pcbs-with-0201-components). Regarding assembly, that GNSS LGA and the magnetometer in a 1.6 x 1.6 12-BGA is surely a treat. I'm looking forward to this.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.