 Upkie Zero
Upkie ZeroWhen running the Pink balancer agent on Upkie, the four CPU cores of the Raspberry Pi are used as follows:
| CPUID | Processes | Threads | Usage (%) |
|---|---|---|---|
| 0 | Spine (+ other system processes) | Logger (+ other system threads) | 10 ± 5 |
| 1 | Spine | Spine loop | 10 ± 5 |
| 2 | Spine | CAN communications | 50 ± 20 |
| 3 | Agent | Python threads | 100 |
On average over all cores, the ARM processor is only used at about 50% of its capacity, but that (or the fact that one core is used at 100% all the time) is enough to drive the CPU temperature up to a problematic level:
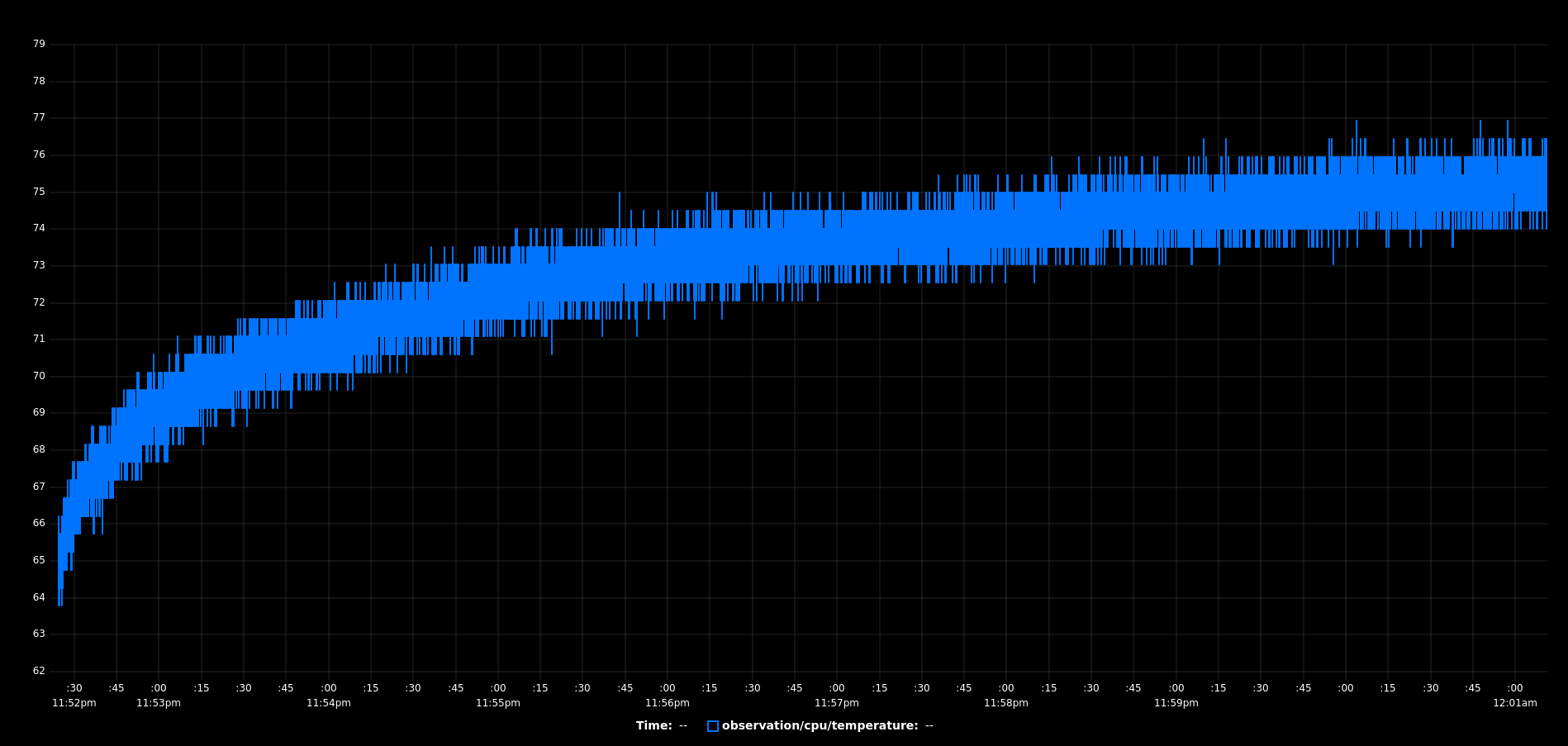
(If you were wondering why Vulp has a CPU temperature observer, now you now 😉) The issue is that to protect itself the Raspberry Pi throttles all computations if its CPU temperature hits 80 °C, which for Upkie results mostly in skipped control frames (wheels apply their commanded velocities for too long ⇒ balancing degrades) and in the worst case triggers Vulp's safety of stopping actuators when no action is sent for more than 100 ms.
Luckily it's not hard to cool down a Pi. Having a standing fan blow air at Upkie from the sides, where its wide "seal ears" are, does the job just fine. But the robot is not designed to stay near a fan, so let's give him an "earpiece" so that it carries its own fan:
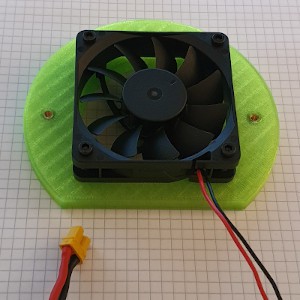
There is already a second male XT-30 connector on the pi3hat in Upkie's head, so we can order a 24 V DC fan from online retail, solder a female XT-30 connector to it, and just plug it to the power bus. In this update, the fan has the following properties:
- Dimensions: 60x60x15 mm
- Speed: 4700 rpm
- Noise: 32 dBA
- Power: 1.8 W
- Flow: 44 m³/h
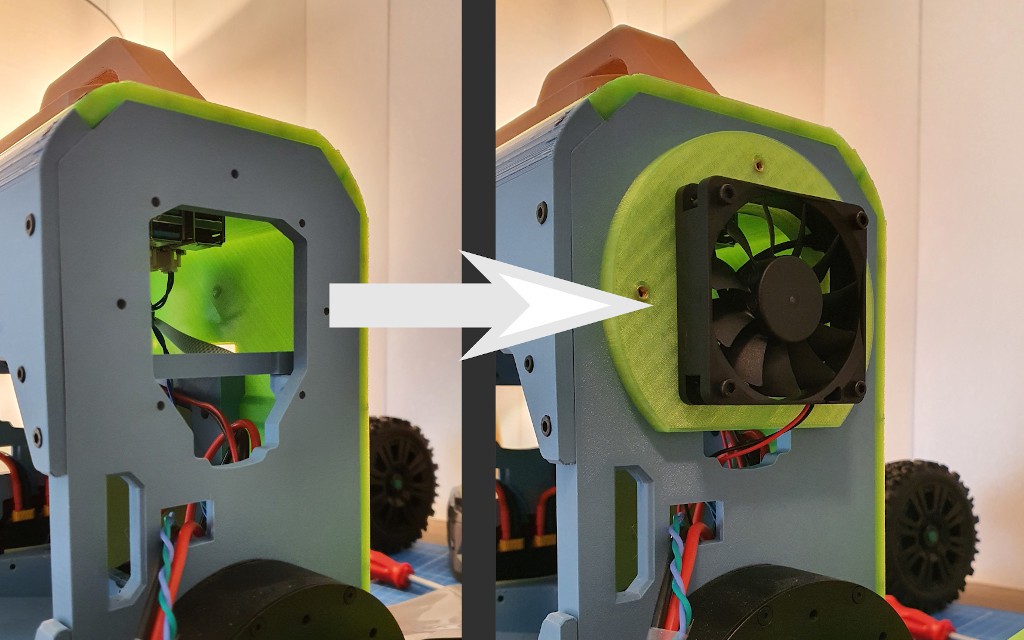
The mount is a temporary adapter to connect to the existing right plate. Once we have settled on fan dimensions, we can redesign the plate so that it plugs into it directly:
The fan is effective immediately. It brings down the CPU temperature to an equilibrium around 43 °C while the balancer is running full steam:
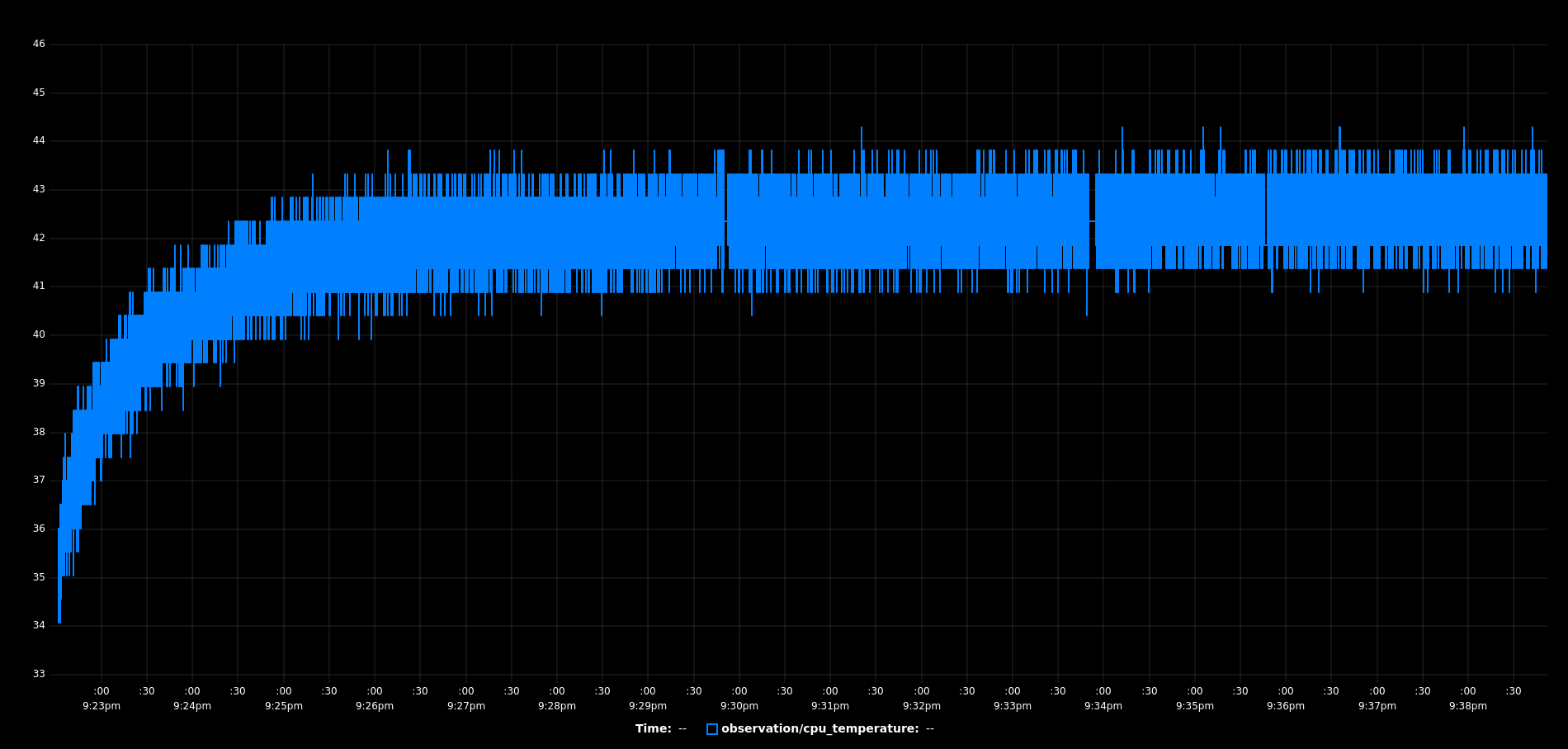
Now the issue has become noise 😅 The fan's continuous 32 dBA relentlessly drill into the ears of neighboring humans, whose thoughts are inevitably driven to the next revision: smaller fan, less dBA!
→ 🔉
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.