 Upkie Zero
Upkie ZeroThis project log follows up to Hollow leg, part 1, where we redesigned Upkie's femur to route cables through. We now do the same for the tibia.
Our goals are the same:
- Ensure that cables don't collide with the limb during motion.
- Keep a large range of motion for knee joint.
Again, we switch to 3D printing for the tibia part, with a cable guiding hole going through it. The part is identical to the femur, but the heat-set insert holes are both on the same side this time:

The ankle socket is redesigned as well with an hexagonal shape to better transmit torques:

We also switched to cable sleeves rather than corrugated plastic tubing, as they slide more smoothly and bend less awkwardly:

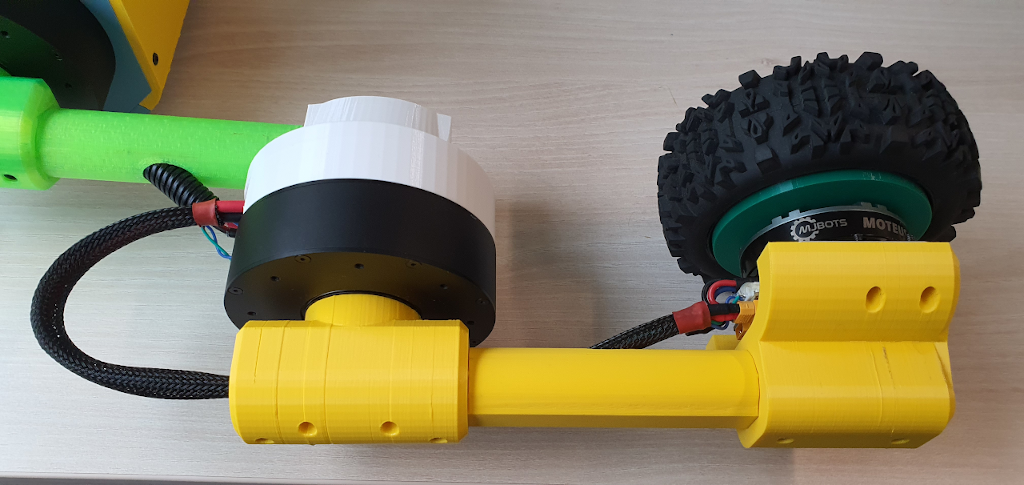
Assembled, the completed hollow leg looks like this:
Let's see how this new leg fares on real robots! Details to build and assemble it are further documented in Upkie's build instructions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.